利用开环系统幅相频率特性来判断闭环系统的稳定性。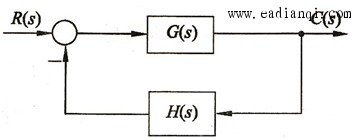 系统开环传递函数 系统闭环传递函数 设: PK为系统的开环传递函数中在[s]平面虚轴右边极点的个数 P为系统的闭环传递函数中在[s]平面虚轴右边极点的个数 奈奎斯特(Nyquist)稳定判据 自动控制网www.eadianqi.com版权所有 1 当ω从-∞→+∞变化时,系统开环幅相频率特性曲线G(jω)H(jω),不包围(-1,j0)点。 2 当ω从-∞→+∞变化时,系统开环幅相频率特性曲线G(jω)H(jω),逆时针包围(-1,j0)点PK圈。 3 当ω从-∞→+∞变化时,系统开环幅相频率特性曲线G(jω)H(jω),通过(-1,j0)点,则闭环系统处于临界稳定状态。 奈奎斯特(Nyquist)稳定判据 设系统开环传递函数为 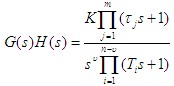 式中υ——开环传递函数中位于原点的极点个数。 本文来自www.eadianqi.com 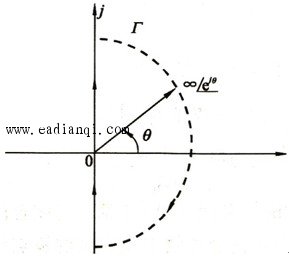 修正后,由四部分组成: 1以原点为圆心,以无限大为半径的大半圆; 2由-j∞到j0-的负虚轴; 3以原点圆心,以ε (ε→0)为半径的从j0-到j0+的小半圆。 4由j0+沿正虚轴到+j∞;  s平面上有位于坐标原点的υ个极点,奈奎斯特(Nyquist)稳定判据为: 当系统的开环传递函数有υ个极点位于s平面坐标原点时,如果增补开环频率特性曲线G(jω)H(jω)(ω从-∞→+∞)逆时针包围(-1,j0)点的次数 N 等于系统开环右极点个数 PK,则闭环系统稳定,否则系统不稳定。 |