|
����ʽ�ŷ�����ϵͳ��һ������ϵͳ���ڴ�ϵͳ�У������������������е�������ֵĽṹ�������Լ����Ƶ�·���������Ӱ�쵽ϵͳ�Ĺ������ȡ�Ҫ���ϵͳ�Ĺ������ȣ�Ӧ���⼸�����濼�ǣ�����Ʋ�����������ܣ����ٲ���ǣ����þ��ܴ����������ٴ������д�����϶�ȡ�����Щ�����������ڽṹ���յĹ�ϵ���ܵ�һ�������ơ�Ϊ�ˣ���Ҫ�ӿ��Ʒ����ϲ�ȡһЩ��ʩ���ֲ��䲻�㡣 ��������www.eadianqi.com 1.��ϸ����· �Զ�������www.eadianqi.com��Ȩ����
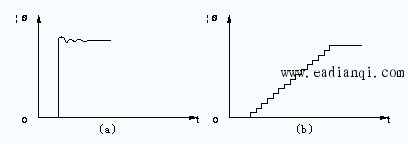
��νϸ����·���ǰѲ��������һ���ٷֵ�ϸһЩ����ʮϸ����·����ԭ������һ���������岽�������һ����Ϊ����10���������һ�������仰˵������ʮϸ����·���ڽ����ٶȲ��������£���ʹ���嵱����С��ԭ���� ����ϸ�֣���������ĵ���������Ծ�����ֵ�ģ���Ӧ�Ľ�λ����ͼ1(a)��ʾ������ϸ�ֺ�������ĵ���Ҫ��������С���ı仯�����ܴﵽ�ֵ����Ӧ�Ľ�λ����ͼ1(b)��ʾ�� �Զ�������www.eadianqi.com��Ȩ����
ͼ1 ϸ��ǰ��һ����λ�Ʋ���ͼ �Զ�������www.eadianqi.com��Ȩ����
��a�� ��ϸ�� ��b�� ϸ�ֺ� �Զ�������www.eadianqi.com��Ȩ���� 2.����϶���� �Զ�������www.eadianqi.com��Ȩ����
��϶�����ֳƷ����϶��������е�������ڸı�ת��ʱ�����ڳ�϶�Ĵ��ڣ�����������Ŀ��ߣ�������̨��ʵ���ƶ����ڿ����ŷ�ϵͳ�У����ֳ�϶�����������ӹ����Ⱦ��кܴ��Ӱ�죬������Բ�������϶������ԭ���ǣ��Ȳ����϶�Ĵ�С����Ϊ 3.���ݾ����� �Զ�������www.eadianqi.com��Ȩ���� �ڲ���ʽ�����ŷ�����ϵͳ�У�˿�ܵ��ݾ�������ֱ��Ӱ���Ź���̨��λ�ƾ��ȣ�������߿����ŷ�����ϵͳ�ľ��ȣ��ͱ������Բ���������ԭ����ͼ2��ʾ��ͨ����˿�ܵ��ݾ����ʵ�⣬�õ�˿��ȫ�̵����ֲ����ߡ���������и��������Ϊ��ʱ������ʵ�ʵ��ƶ�����������۵��ƶ����룬Ӧ�ò��ÿ۳���������ָ��ķ�ʽ�������IJ�����ʹ�����������һ���������Ϊ��ʱ������ʵ�ʵ��ƶ�����С�����۵��ƶ����룬Ӧ�ò�ȡ���ӽ�������ָ��ķ�ʽ�������IJ�����ʹ�����������һ��������������ǣ� ��������www.eadianqi.com (1) �������������˷ֱ������������IJ����� ��������www.eadianqi.com
(2) �������������ϣ�����˿��ȫ�̵����ֲ���������������ݾ����IJ���ԭ�������ò������ػ飻 �Զ�������www.eadianqi.com��Ȩ���� (3) ����������̨�ƶ�ʱ����װ�ڻ����ϵ�������ÿ�뵲��Ӵ�һ�Σ��ͷ���һ�������źţ����ݾ������в������������ݾ�Ļ����� ��������www.eadianqi.com
ͼ2 �ݾ�����ԭ�� ��������www.eadianqi.com ����1—������ƶ���û���ݾ��� ����2—ʵ�ʵ��ƶ������ݾ���� ��������www.eadianqi.com
����3—����ǰ��������� ����4—�������������� �Զ�������www.eadianqi.com��Ȩ���� |
 ��������www.eadianqi.com
��������www.eadianqi.com 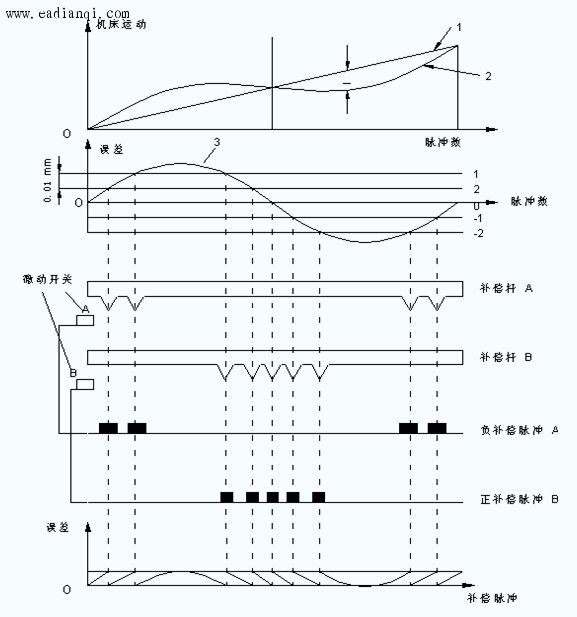 �Զ�������www.eadianqi.com��Ȩ����
�Զ�������www.eadianqi.com��Ȩ����