|
水泥行业中,执行机构应用场合很广。但原有的控制模式故障率偏高,对生产均衡稳定地进行以及工艺参数的调整极为不利,控制作用不能很好地发挥。本文介绍利用“无伺服”控制概念对电动执行机构进行控制。 1 问题的提出 我公司湿法生产线有几十台电动执行机构,大多数通过手操器、伺服放大器来实现对工艺阀门的控制。由于工况条件差、电子元器件易老化,伺服放大器容易发生故障,影响了整个执行机构的性能。如伺服放大器振荡,引起执行器振荡,导致伺服电动机抱闸失灵,增加了执行器伺服电动机的故障率,造成工艺参数的波动,影响了生产。 2 原控制原理 原控制原理框图如图1。手操器给定前置磁放大器4~20mA信号,前置磁放大器的线路是直流输出内反馈推挽线路,给定信号经过和电动执行器位置发送器反馈的4~20mA信号比较后,由电子开关与触发器控制电动执行器伺服电动机正转或反转;同时,电动执行器位置发送器反馈的4~20mA信号,也随之发生变化,并把反馈信号送回前置磁放大器进行比较,直到给定与反馈信号平衡为止。由于反馈信号与手操器的显示和伺服前置磁放大器串联,因此反馈与给定信号比较的同时,也在手操器上显示反馈信号的变化过程。 图片1: 自动控制网www.eadianqi.com版权所有 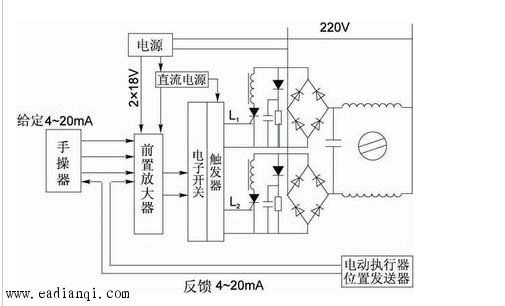 自动控制网www.eadianqi.com版权所有 自动控制网www.eadianqi.com版权所有
图1 伺服放大控制原理 本文来自www.eadianqi.com
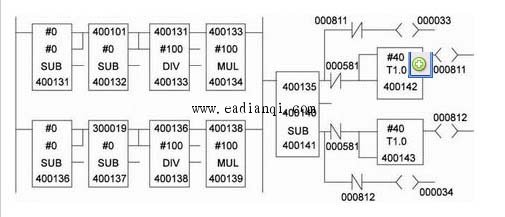
图2 无伺服控制梯形图程序 自动控制网www.eadianqi.com版权所有
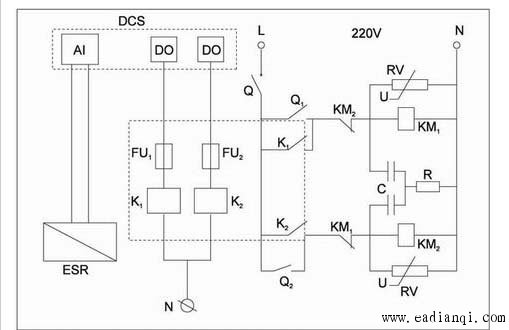
梯形图程序中400101的值由操作员给定,经除法与乘法运算取整后赋值给400135;同理300019为反馈值,经除法与乘法运算取整后赋值给400140。400135与400140比较后分别驱动相应的000033线圈,使硬线路(见图3)中的中间继电器K1吸合,交流接触器KM1动作,电动机正转;反之驱动000034线圈,使硬线路中的中间继电器K2吸合,交流接触器KM2动作,电动机反转,从而实现了现场电动执行器伺服电动机的无伺服正转或反转。
图3 电动执行器控制原理 自动控制网www.eadianqi.com版权所有 |