|
整定自控系统很多人会想到自控系统PID参数整定,自动控制网小编与大家分享自控系统现场调试干货:整定自控系统除PID参数整定外,还应注意执行机构动作次数、PID死区、系统调节裕度、调节阀通流量、调节阀空行程、调节阀线性和系统耦合问题,才能真正让自控系统到达最佳控制效果。 本文来自www.eadianqi.com 一般来说,不管对于直行程还是角行程,对于国产还是进口,对于智能还是简单的执行器,动作次数不大于10次/分钟。对于一些进口执行器,尤其是日本的,次数还要减少。 对于执行机构是变频调节的(这里是说纯变频调节,而不是指执行机构采用变频电机),可以让参数快点,因为变频器始终处于运行状态。需要注意的是,变频器转速线性不能太陡,否则变频器输出电流大幅度变化,影响变频寿命。 2、PID死区问题 为了减少执行器动作次数,一般都对PID调节器设置死区。在死区范围内,都认为输入偏差为0。当超过死区后,输入偏差才从0开始计算。死区可以有效减少执行器的动作次数。但是死区过大的话又带来了新的问题:调节精度降低,不过对于一般的调节系统,不要求调节精度过高,精度高意义也不大。 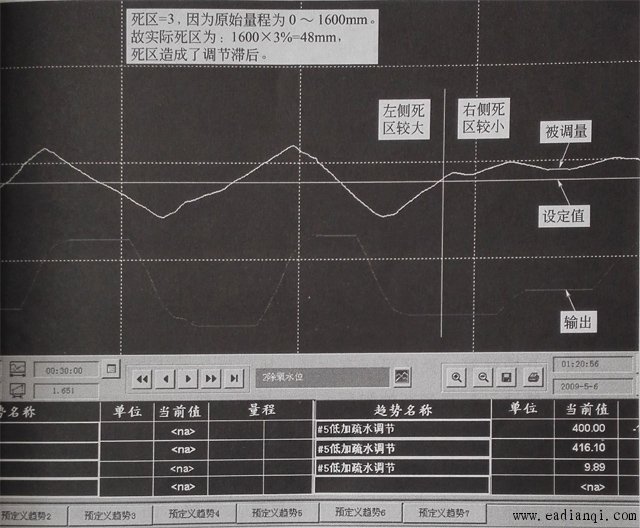 图1 PID死区=3时被调量的波动 自动控制网www.eadianqi.com版权所有 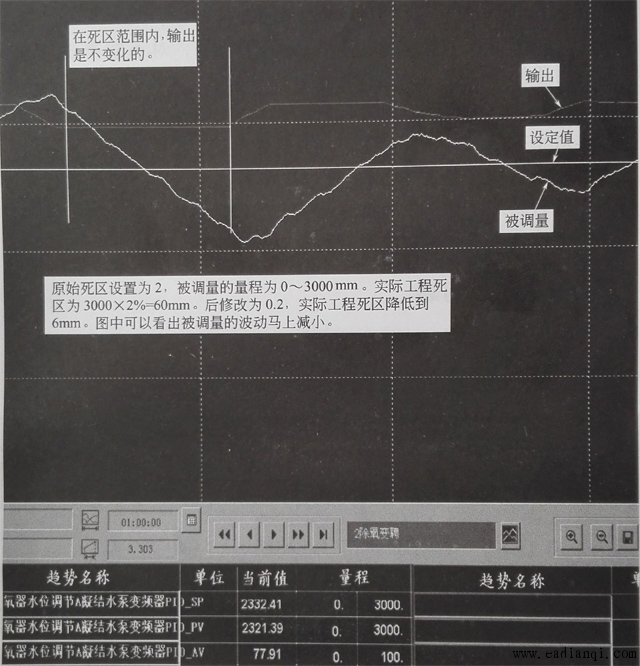 图2 PID死区=2时被调量的波动马上减小 |