|
采用滞后网络进行校正,主要是利用其高频幅值衰减特性。应力求避免最大滞后角发生在已校正系统开环剪切频率 1、根据性能指标对误差系数的要求,确定系统的开环增益K; 2、作出原系统的伯德图,求出原系统的相角和增益裕量; 本文来自www.eadianqi.com 3、如原系统的相角和增益裕量不满足要求,找一新的剪切频率 4、确定使幅值曲线在新的剪切频率 5、取滞后校正装置的第二个转折频率 6、作出校正后系统的伯德图,检验是否全部达到性能指标。 例6-2 设单位反馈系统的开环传递函数 解:(1)根据稳态指标要求求出K值。 以 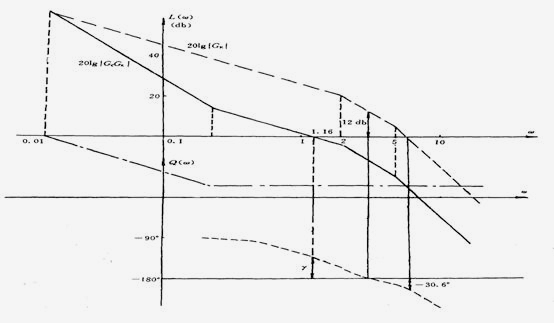
图1 滞后校正装置校正前后系统的对数特性
(2) 性能指标要求(3) 选择 |