基本周转轮系传动比的计算   周转轮系的传动比计算公式:  注意事项: 1.公式中  一定是两个中心轮(特殊时为一个中心轮和一个行星轮). 一定是两个中心轮(特殊时为一个中心轮和一个行星轮).2. 例4:已知:下图轮系中各轮齿数。求: 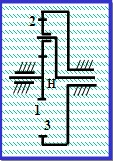
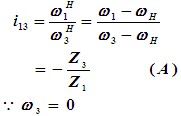
解:由转化机构可得
例5:图示轮系中,已知:
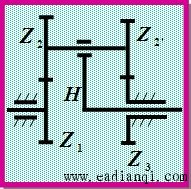
 自动控制网www.eadianqi.com版权所有  例6:图示轮系中,已知: 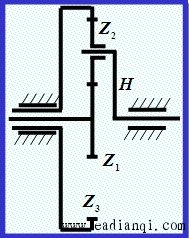
解:
 本文来自www.eadianqi.com 本文来自www.eadianqi.com 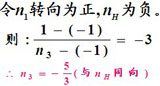 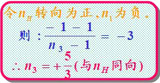
例7:图示轮系中,已知:
解:
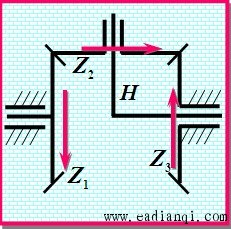
例8 如图所示的差动轮系中,各轮的齿数为:
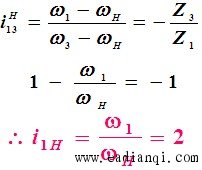
解:设转速
本文来自www.eadianqi.com 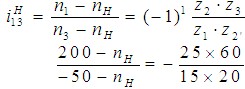 从而 解得 负号表示 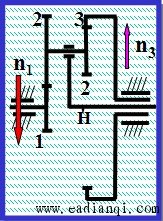
例9 如图所示的手动葫芦中,已知各轮齿数:
解:当手动链轮S转动时,齿轮1推动齿轮 由于双联齿轮2- 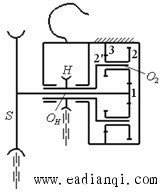
例9续 齿轮3为固定太阳轮,齿轮1为活动太阳轮,H为行星架,它们和行星轮2-
计算转化机构的传动比 本文来自www.eadianqi.com 因 故 即手动轮S转10转,起重链轮转1转。 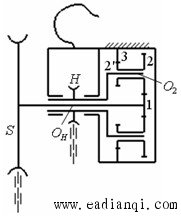 |