
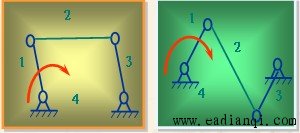
组成:构件1,3---连架杆
构件2--- 连杆 构件4--- 机架
曲柄:能作整周转动的连架杆。 本文来自www.eadianqi.com

1.曲柄摇杆机构 2.双曲柄机构 3.双摇杆机构

1.固定最短杆邻边:得曲柄摇杆机构;
2.固定最短杆 :得双曲柄机构; 3.固定最短杆对边:得双摇杆机构。
双曲柄机构中的两个特例:
 平行双曲柄机构 反平行双曲柄机构 平行双曲柄机构 反平行双曲柄机构
平面四杆机构的基本知识
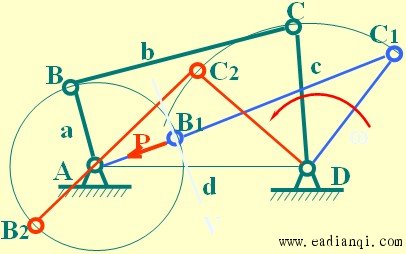
*急回特性
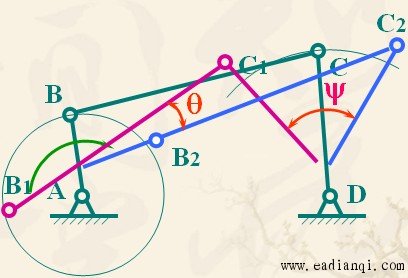
1、极位:当摇杆处在左,右两极端位置时,对应整个机构所处的位置,即
2、极位夹角:当机构处在极位时对应曲柄两位置之间所夹锐角,称为极位夹角。用 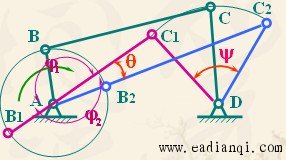
摇杆:
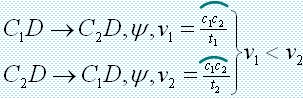 曲柄:  曲柄匀速转动,摆杆变速摇动,急回运动如下:
*死点位置
死点位置:在有往复运动构件的机构中,从动件与连杆共线的位置即为死点位置。
本文来自www.eadianqi.com |