|
采用控制辅助输出量的办法间接控制过程的主要输出量,这就是推理控制(Inferential Control)的主要构想。它是由美国的Coleman Brosilow和Martin Tong等人于1978年提出来的。他们根据过程输出的性能要求,在建立过程数学模型的基础上,通过数学推理,导出推理控制系统应该具有的结构形式。 一、推理控制系统的组成  推理控制部分的实现框图 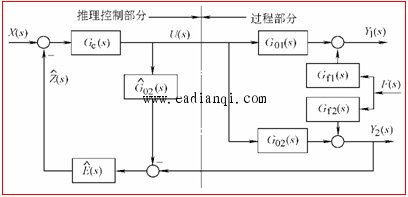 由图8-14不难看出,推理控制具有三个基本特征。 1.实现了信号分离 当干扰对辅助输出通道的数学模型完全匹配时,即 则有 2.实现了不可测干扰的估计 已知估计器  (8-83) (8-83)它等于不可测干扰 对过程主要输出(即被控变量) 影响的估计 3.可实现理想控制 二、推理—反馈控制系统 在实际生产中,过程模型不可能与实际过程完全匹配,因而系统的主要输出也不可避免地存在稳态误差。为了消除主要输出的稳态误差,应引入主要输出的反馈。但由于主要输出又不可测量,所以必须采用推理方法估算出主要输出量,从而构成推理——反馈控制系统。 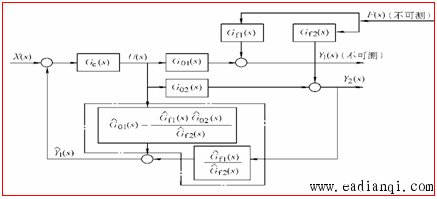 图8-15推理—反馈控制系统框图 由上图可得: 由式(8-87)可得不可测干扰的估算式为 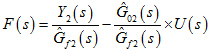 (8-88) (8-88)式(8-88)表明,主要输出变量的估计值是可测的辅助输出变量和控制变量的函数,将它作为反馈量构成的推理-反馈控制系统。 当模型不存在误差时,则有  (8-89) (8-89)式(8-99)说明反馈信号是实际的主要输出变量,此时只要控制器GC(s)中包含积分调节规律,就能够保证主要输出的稳态误差为零;当存在模型误差或其它干扰而导致 |