|
ЁЁЁЁвЛИіздЖЏПижЦЯЕЭГЕФЙ§ЖЩЙ§ГЬЛђепПижЦжЪСПЃЌгыБЛПиЖдЯѓЁЂИЩШХаЮЪНгыДѓаЁЁЂПижЦЗНАИЕФШЗЖЈМАПижЦЦїВЮЪ§ећЖЈгазХУмЧаЕФЙиЯЕЁЃдкПижЦЗНАИЁЂЙувхЖдЯѓЕФЬиадЁЂПижЦЙцТЩЖМвбШЗЖЈЕФЧщПіЯТЃЌПижЦжЪСПжївЊОЭШЁОігкПижЦЦїВЮЪ§ЕФећЖЈЁЃдкПижЦЗНАИЁЂЙувхЖдЯѓЕФЬиадЁЂПижЦЙцТЩЖМвбШЗЖЈЕФЧщПіЯТЃЌПижЦжЪСПжївЊОЭШЁОігкПижЦЦїВЮЪ§ЕФећЖЈЁЃЫљЮНПижЦЦїВЮЪ§ЕФећЖЈЃЌОЭЪЧАДеевбЖЈЕФПижЦЗНАИЃЌЧѓШЁЪЙПижЦжЪСПзюКУЕФПижЦЦїВЮЪ§жЕЁЃОпЬхРДЫЕЃЌОЭЪЧШЗЖЈзюКЯЪЪЕФПижЦЦїБШР§ЖШδЁЂЛ§ЗжЪБМфTIКЭЮЂЗжЪБМфTDЁЃ здЖЏПижЦЭјwww.eadianqi.comАцШЈЫљга ЁЁЁЁЕїНкЦїВЮЪ§ећЖЈЕФРэТлЛљДЁ ЁЁЁЁ1. ПижЦЯЕЭГЕФЮШЖЈадгыЫЅМѕжИЪ§ ЁЁЁЁ 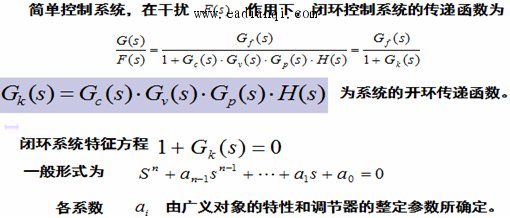 ЁЁЁЁЕїНкЦїВЮЪ§ећЖЈЕФЪЕжЪОЭЪЧбЁдёКЯЪЪЕФЕїНкЦїВЮЪ§ЃЌЪЙЦфБеЛЗПижЦЯЕЭГЕФЬиеїЗНГЬЕФУПвЛИіИљЖМФмТњзуЮШЖЈадЕФвЊЧѓЁЃ ЁЁЁЁ 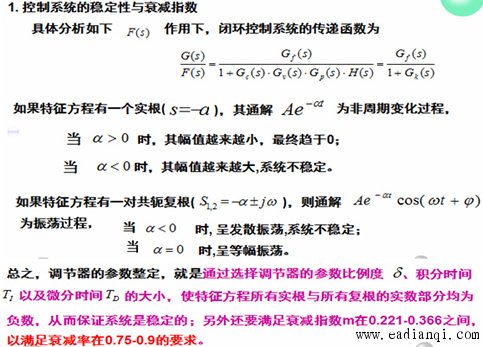 ЁЁЁЁ2. ПижЦЯЕЭГЕФЮШЖЈдЃСП ЁЁЁЁЮЊСЫБЃжЄЯЕЭГЕФЙ§ЖЩЙ§ГЬОпгавЛЖЈЕФЮШЖЈдЃСПЃЌОЭвЊЪЙБеЛЗЯЕЭГЕФЬиеїИљОпгавЛЖЈЕФЫЅМѕжИЪ§ ЁЃ ЁЁЁЁзлЩЯЫљЪіЃЌЮоТлЪЧПижЦЯЕЭГЕФЮШЖЈадЁЂЮШЖЈдЃСПЃЌЛЙЪЧПижЦЯЕЭГЕФПьЫйадЁЂзМШЗадОљгыЯЕЭГЕФЫЅМѕТЪЛђЫЅМѕжИЪ§гаЙиЁЃЫљвдЃЌЕїНкЦїВЮЪ§ећЖЈЕФЪЕжЪОЭЪЧЭЈЙ§бЁдёКЯЪЪЕФЕїНкЦїВЮЪ§ЃЌвдДяЕНЙцЖЈЕФЫЅМѕТЪЛђЫЅМѕжИЪ§ЃЌДгЖјзюжеБЃжЄЯЕЭГЕФПижЦжЪСПЁЃ ЁЁЁЁЕїНкЦїВЮЪ§ЕФЙЄГЬећЖЈ ЁЁЁЁ 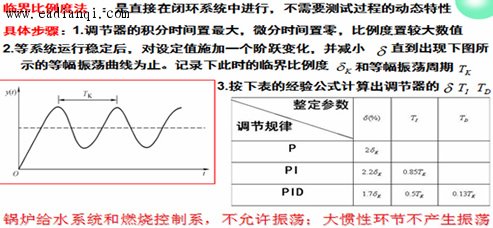 ЁЁЁЁСйНчБШР§ЖШЗЈБШНЯМђЕЅЗНБуЃЌШнвзеЦЮеКЭХаЖЯЃЌЪЪгУгквЛАуЕФПижЦЯЕЭГЁЃЕЋЪЧЖдгкСйНчБШР§ЖШКмаЁЕФЯЕЭГВЛЪЪгУЁЃвђЮЊСйНчБШР§ЖШКмаЁЃЌдђПижЦЦїЪфГіЕФБфЛЏвЛЖЈКмДѓЃЌБЛЕїВЮЪ§ШнвзГЌГідЪаэЗЖЮЇЃЌгАЯьЩњВњЕФе§ГЃНјааЁЃСйНчБШР§ЖШЗЈЪЧвЊЪЙЯЕЭГДяЕНЕШЗљеёЕДКѓЃЌВХФмевГіδkгыTkЃЌЖдгкЙЄвеЩЯВЛдЪаэВњЩњЕШЗљеёЕДЕФЯЕЭГБОЗНЗЈврВЛЪЪгУЁЃЙјТЏИјЫЎЯЕЭГКЭШМЩеПижЦЯЕЃЌВЛдЪаэеёЕДЃЛДѓЙпадЛЗНкБОЩэВЛВњЩњЕШЗљеёЕД здЖЏПижЦЭјwww.eadianqi.comАцШЈЫљга ЁЁЁЁ 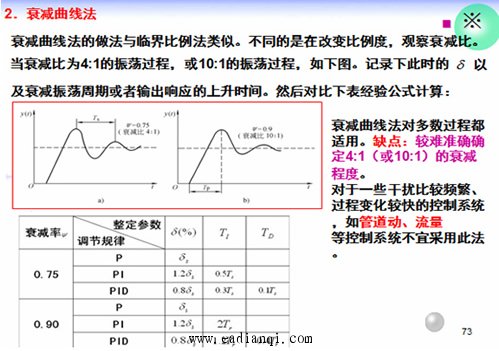 ЁЁЁЁВЩгУЫЅМѕЧњЯпЗЈБиаызЂвтвдЯТМИЕуЁЃ ЁЁЁЁ(1)МгЕФИЩШХЗљжЕВЛФмЬЋДѓЃЌвЊИљОнЩњВњВйзївЊЧѓРДЖЈЃЌвЛАуЮЊЖюЖЈжЕЕФ5ЃЅзѓгвЃЌвВгаР§ЭтЕФЧщПіЁЃ ЁЁЁЁ(2)БиаыдкЩЯвеВЮЪ§ЮШЖЈЧщПіЯТВХФмЪЉМгИЩШХЃЌЗёдђЕУВЛЕНе§ШЗЕФδsЁЂTsЁЂЛђδs’КЭTЩЯЩ§жЕЁЃ ЁЁЁЁ(3ЃЉЖдгкЗДгІПьЕФЯЕЭГЃЌШчСїСПЁЂЙмЕРбЙСІКЭаЁШнСПЕФвКЮЛПижЦЕШЃЌвЊдкМЧТМЧњЯпЩЯбЯИёЕУЕН4ЃК1ЫЅМѕЧњЯпБШНЯРЇФбЁЃвЛАувдБЛПиБфСПРДЛиВЈЖЏСНДЮДяЕНЮШЖЈЃЌОЭПЩвдНќЫЦЕиШЯЮЊДяЕН4ЃК1ЫЅМѕЙ§ГЬСЫЁЃ ЁЁЁЁЫЅМѕЧњЯпЗЈБШНЯМђБуЃЌЪЪгУгквЛАуЧщПіЯТЕФИїжжВЮЪ§ЕФПижЦЯЕЭГЁЃЕЋЖдгкИЩШХЦЕЗБЃЌМЦТМЧњЯпВЛЙцдђЃЌВЛЖЯгааЁАкЖЏЕФЧщПіЃЌгЩгкВЛвзЕУЕНзМШЗЕФЫЅМѕБШР§ЖШδsКЭЫЅМѕжмЦкTsЃЌЪЙЕУетжжЗНЗЈФбгкгІгУЁЃ ЁЁЁЁ 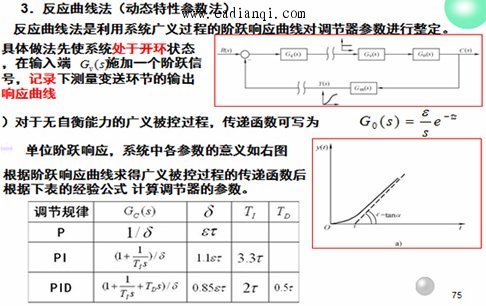 ЁЁЁЁ4ЃЎШ§жжЙЄГЬећЖЈЗНЗЈЕФБШНЯ ЁЁЁЁЯрЭЌЃКШ§жжЙЄГЬећЖЈЗНЗЈЖМЪЧЭЈЙ§ЪдбщЛёШЁФГаЉЬиеїВЮЪ§ЃЌШЛКѓдйАДМЦЫуЙЋЪНЫуГіЕїНкЦїЕФећЖЈВЮЪ§ ЁЁЁЁВЛЭЌЃКЗДгІЧњЯпЗЈЭЈгУадзюЧПЃЛСйНчБШР§ЖШЗЈКЭЫЅМѕЧњЯпЗЈЖМЮоашеЦЮеБЛПиЙ§ГЬЕФЪ§бЇФЃаЭЃЛДгБеЛЗЪдбщЖдИЩШХгаНЯКУЕФвжжЦзїгУЃЌПЊЛЗЪдбщЖдЭтНчИЩШХЕФвжжЦФмСІКмВюЕФвтвхЩЯЫЕЃЌМѕЧњЯпЗЈзюКУЃЌСйНчБШР§ЖШЗЈДЮжЎЃЌЗДгІЧњЯпЗЈзюВюЁЃ БОЮФРДздwww.eadianqi.com
|