|
(1)机床相对运动的规定 工件相对静止,而刀具运动。 在机床上,始终认为工件静止,而刀具是运动的。这样编程人员在不考虑机床上工件与刀具具体运动的情况下,就可以依据零件图样,确定机床的加工过程。 (2)机床坐标系的规定 一个直线进给运动或一个圆周进给运动定义一个坐标轴。在ISO和EIA标准中都规定直线进给运动用右手直角笛卡尔坐标系X、Y、Z表示,常称基本坐标系。X、Y、Z坐标轴的相互关系用右手定则决定。如图1所示,图中大拇指的指向为X轴的正方向,食指指向为Y轴的正方向,中指指向为Z轴的正方向。 围绕X、Y、Z轴旋转的圆周进给坐标轴分别用A、B、C表示,根据右手螺旋法则,以大拇指指向十X、+Y。+Z方向,则食指、中指等的指向是圆周进给运动的 十A 、+B、+C方向。 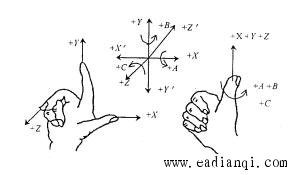 本文来自www.eadianqi.com 本文来自www.eadianqi.com 数控机床的进给运动,有的由刀具向工件运动来实现;有的由工作台带着工件向刀具运动来实现。为了便于在不知道刀具、工件之间如何作相对运动的情况下,确定机床的进给操作,上述坐标轴运动的正方向都是假定工件不动,刀具相对于工件(静止的)而运动来确定的。如果是工件相对于刀具运动,标准机床坐标系中X、Y、Z坐标轴的相互关系用右手笛卡尔直角坐标系决定。 在数控机床上,机床的动作是由数控装置来控制的,为了确定数控机床上的成形运动和辅助运动,必须先确定机床上运动的位移和运动的方向,这就需要通过坐标系来实现,这个坐标系被称之为机床坐标系。 标准机床坐标系中X、Y、Z坐标轴的相互关系用右手笛卡尔直角坐标系决定 1) 伸出右手的大拇指、食指和中指,并互为90度。则大拇指代表X坐标,食指代表Y坐标,中指代表Z坐标。 2) 大拇指的指向为X坐标的正方向,食指的指向为Y坐标的正方向,中指的指向为Z坐标的正方向。 自动控制网www.eadianqi.com版权所有 3) 围绕X、Y、Z坐标旋转的旋转坐标分别用A、B、C表示,根据右手螺旋定则,大拇指的指向为X、Y、Z坐标中任意一轴的正向,则其余四指的旋转方向即为旋转坐标A、B、C的正向。 (3)运动方向的规定 增大刀具与工件距离的方向即为各坐标轴的正方向。 |