本文来自www.eadianqi.com
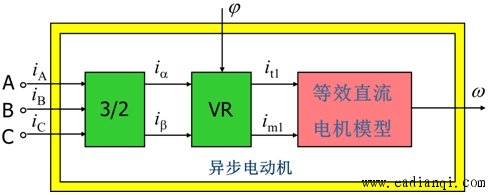
在设计矢量控制系统时,可以认为,在控制器后面引入的反旋转变换器VR-1与电机内部的旋转变换环节VR抵消,2/3变换器与电机内部的3/2变换环节抵消,如果再忽略变频器中可能产生的滞后,则图6-53中虚线框内的部分可以完全删去,剩下的就是直流调速系统了。 自动控制网www.eadianqi.com版权所有
采用两组晶闸管反并联的可逆V-M系统,如果两组装置的整流电压同时出现,便会产生不流...