(1)电压空间矢量运动轨迹
在常规的 PWM 变压变频调速系统中,异步电动机由六拍阶梯波逆变器供电,这时的电压空间矢量运动轨迹是怎样的呢?
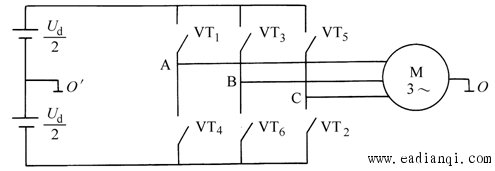
为了讨论方便起见,再把三相逆变器-异步电动机调速系统主电路的原理图绘出,图6-27中六个功率开关器件都用开关符号代替,可以代表任意一种开关器件。
主电路原理图 |
 |
|
图6-27 三相逆变器-异步电动机调速系统主电路原理图 |
开关工作状态 本文来自www.eadianqi.com
如果,图中的逆变器采用180°导通型,功率开关器件共有8种工作状态,其中
6 种有效开关状态;
2 种无效状态(因为逆变器这时并没有输出电压):
上桥臂开关 VT1、VT3、VT5 全部导通
下桥臂开关 VT2、VT4、VT6 全部导通 |
|
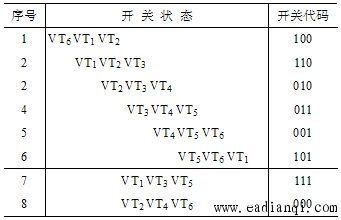
开关状态表 |
 |
开关控制模式
对于六拍阶梯波的逆变器,在其输出的每个周期中6 种有效的工作状态各出现一次。逆变器每隔 /3 时刻就切换一次工作状态(即换相),而在这/3 时刻内相应空间电压矢量保持不变。 /3 时刻就切换一次工作状态(即换相),而在这/3 时刻内相应空间电压矢量保持不变。 |
 |
|
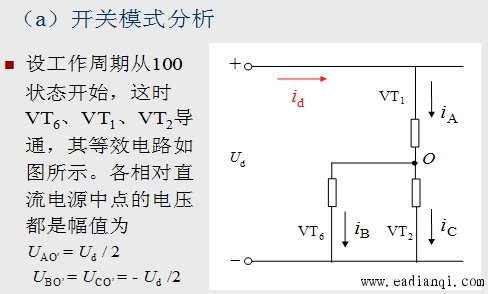
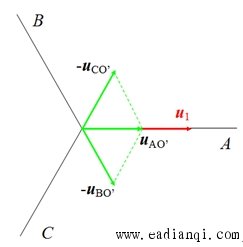
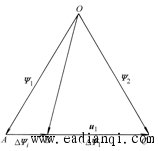
(b)工作状态100的合成电压空间矢量 自动控制网www.eadianqi.com版权所有
由图可知,三相的合成空间矢量为 u1,其幅值等于Ud,方向沿A轴(即X轴)。 |
 |
c)工作状态110的合成电压空间矢量
u1 存在的时间为/3,在这段时间以后,工作状态转为110,和上面的分析相似,合成空间矢量变成图中的 u2 ,它在空间上滞后于u1 的相位为/3 弧度,存在的时间也是/3 。 |
 |
|
(d)每个周期的六边形合成电压空间矢量 本文来自www.eadianqi.com
依此类推,随着逆变器工作状态的切换,电压空间矢量的幅值不变,而相位每次旋转/3 ,直到一个周期结束。
这样,在一个周期中 6 个电压空间矢量共转过 2弧度,形成一个封闭的正六边形,如图所示。 |
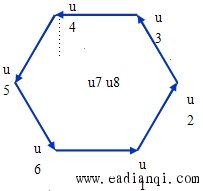 图6-28d 图6-28d |
|
(2)定子磁链矢量端点的运动轨迹
电压空间矢量与磁链矢量的关系
一个由电压空间矢量运动所形成的正六边形轨迹也可以看作是异步电动机定子磁链矢量端点的运动轨迹。对于这个关系,进一步说明如下:
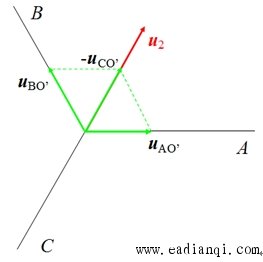
设在逆变器工作开始时定子磁链空间矢量为 1,在第一个 /3 期间,电动机上施加的电压空间矢量为图6-28d中的 u1 ,把它们再画在图6-29中。按照式(6-41)可以写成 自动控制网www.eadianqi.com版权所有
|
 |
|
图6-29 六拍逆变器供电时电动机电压空间矢量与磁链矢量的关系 |
 (6-45) (6-45) |
也就是说,在/3 所对应的时间 t内,施加 u1的结果是使定子磁链 t内,施加 u1的结果是使定子磁链 1 产生一个增量,其幅值 |u1| 与成正比,方向与u1一致,最后得到图6-29所示的新的磁链,而 1 产生一个增量,其幅值 |u1| 与成正比,方向与u1一致,最后得到图6-29所示的新的磁链,而 |
 (6-46) (6-46) |
|
依此类推,可以写成的通式 |
 (6-47) (6-47) |
 (6-48) (6-48) |
|
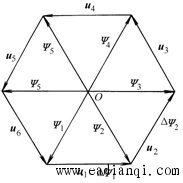
总之,在一个周期内,6个磁链空间矢量呈放射状,矢量的尾部都在O点,其顶端的运动轨迹也就是6个电压空间矢量所围成的正六边形。 本文来自www.eadianqi.com
磁链矢量增量与电压矢量、时间增量的关系
如果 u1 的作用时间t 小于π/3 ,则i 的幅值也按比例地减小,如图 6-30 中的矢量 。可见,在任何时刻,所产生的磁链增量的方向决定于所施加的电压,其幅值则正比于施加电压的时间。 自动控制网www.eadianqi.com版权所有 。可见,在任何时刻,所产生的磁链增量的方向决定于所施加的电压,其幅值则正比于施加电压的时间。 自动控制网www.eadianqi.com版权所有
|
 |
|
图6-30 磁链矢量增量与电压矢量、时间增量的关系 |
4. 电压空间矢量的线性组合与SVPWM控制
如前分析,我们可以得到的结论是:
如果交流电动机仅由常规的六拍阶梯波逆变器供电,磁链轨迹便是六边形的旋转磁场,这显然不象在正弦波供电时所产生的圆形旋转磁场那样能使电动机获得匀速运行。
如果想获得更多边形或逼近圆形的旋转磁场,就必须在每一个期间内出现多个工作状态,以形成更多的相位不同的电压空间矢量。为此,必须对逆变器的控制模式进行改造。 |