|
一、串行口方式0:同步移位寄存器方式
串行口的工作方式0为移位寄存器输入输出方式,方式0发送或接收完8位数据后由硬件置位发送中断标志TI或接收中断标志RI。 自动控制网www.eadianqi.com版权所有
1.方式0发送 自动控制网www.eadianqi.com版权所有 串行数据从RXD引脚输出,TXD引脚输出移位脉冲。CPU将数据写入发送寄存器(SBUF)时,立即启动发送,将8位数据以fosc/12的固定波特率从RXD输出,低位在前,高位在后,直至最高位(D7位)数字移出后,停止发送数据和移位时钟脉冲。 本文来自www.eadianqi.com MOV SCON, #10H ; 串行口方式0 本文来自www.eadianqi.com MOV A, SBUF ; 接收数据 本文来自www.eadianqi.com JNB RI, $ ; 等待数据接收完毕 自动控制网www.eadianqi.com版权所有 2.方式0接收 本文来自www.eadianqi.com
方式0接收前,务必先置位REN=1,允许接收数据。此时,RXD为串行数据输入端,TXD仍为同步脉冲移位输出端。当RI=0和REN=1同时满足时,就会启动一次接收过程。接收器以fosc/12的固定波特率接收TXD端输入的数据。当接收到第8位数据时,将数据移入接收寄存器,并由硬件置位RI,向CPU申请中断。 自动控制网www.eadianqi.com版权所有
MOV SCON, #00H ; 串行口方式0 自动控制网www.eadianqi.com版权所有 MOV SBUF, A ; 将数据送出 自动控制网www.eadianqi.com版权所有
JNB TI, $ ; 等待数据发送完毕 本文来自www.eadianqi.com 工作方式0一般用于对并行输入输出口的扩展,如图1所示。 自动控制网www.eadianqi.com版权所有
自动控制网www.eadianqi.com版权所有
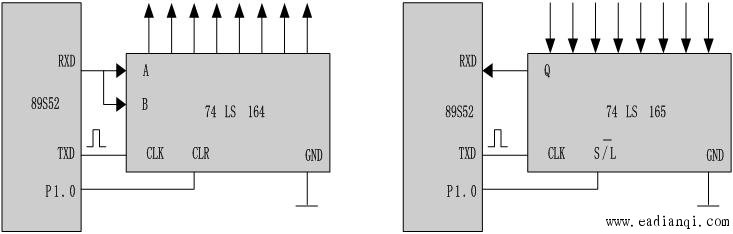 图1 方式0的应用 当SM0=0、SM1=l时,串行口选择方式1,单片机工作于8位数据异步通讯方式(UART)。在方式1时,传送一帧信息为10位,即1位起始位(0),8位数据位(低位在先)和1位停止位(1)。方式1的数据格式如图2所示。 自动控制网www.eadianqi.com版权所有
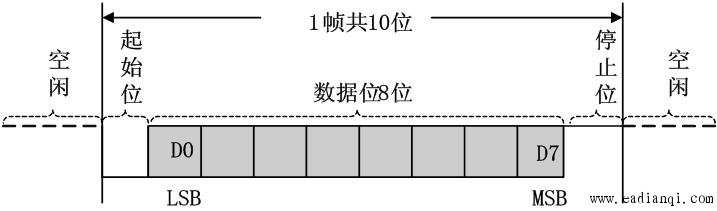 图2 方式1的数据格式 自动控制网www.eadianqi.com版权所有 1.方式1发送 自动控制网www.eadianqi.com版权所有 当CPU执行MOV A,SBUF指令将数据写入发送缓冲SBUF,启动发送。先把起始位输出到TXD,然后把移位寄存器的输出位送到TXD。接着发出第一个移位脉冲(SHIFT),使数据右移一位,并从左端补入0。此后数据将逐位由TXD端送出,而其左面不断补入0。发送完一帧数据后,就由硬件置位TI。 本文来自www.eadianqi.com  图3 方式1发送 本文来自www.eadianqi.com 2.方式1接收 自动控制网www.eadianqi.com版权所有 当REN=1且接收到起始位后,在移位脉冲的控制下,把接收到的数据移入接收缓冲寄存器(SBUF)中,停止位到来后,把停止位送入RB8中,并置位RI,通知CPU接收到一个字符。 本文来自www.eadianqi.com
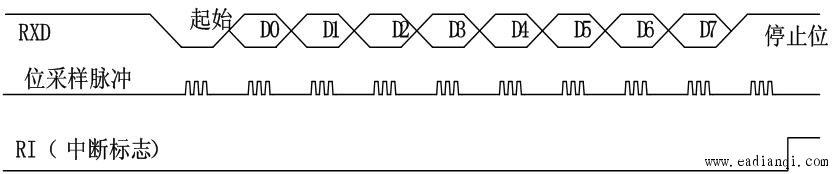 图4 方式1接收
本文来自www.eadianqi.com 当SM0=1、SM1=0时,串行口选择方式2;当SM1=1、SM0=1时,串行口选择方式3。方式2和方式3的工作原理相似,定义为9位的异步通讯接口,发送(通过TXD)和接收(通过RXD)一帧信息都是11位,1位起始位(0)、8位数据位(低位在先)、1位可编程位(即第9位数据)和1位停止位(1)。其数据格式如图5所示。 本文来自www.eadianqi.com 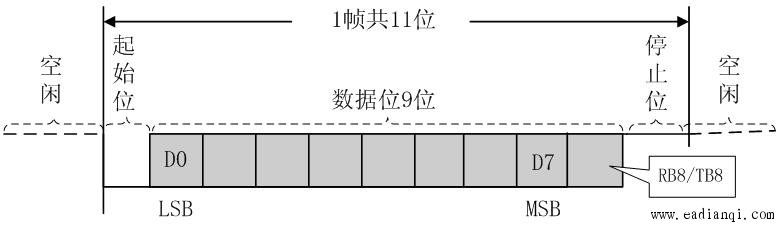 图5 方式2和3的数据格式
自动控制网www.eadianqi.com版权所有
方式2和方式3唯一的差别是方式2的波特率是固定的,方式3的波特率是可变的。 自动控制网www.eadianqi.com版权所有 1.方式2和方式3发送 本文来自www.eadianqi.com 当CPU执行一条数据写入SUBF的指令时,启动发送器发送。把起始位(0)放到TXD端,经过一位时间后,数据由移位寄存器送到TXD端,通过第一位数据,出现第一个移位脉冲。当TB8的内容移到位寄存器的输出位置时,其左面一位是停止位“1”,再往左的所有位全为“0”。这种状态由零检测器检测到后,就通知发送控制器作最后一次移位,然后置TI=1,请求中断。发送过程如图6所示。 自动控制网www.eadianqi.com版权所有
 图6 方式2和3的发送
自动控制网www.eadianqi.com版权所有 2.方式2和方式3接收 自动控制网www.eadianqi.com版权所有 接收时,数据从右边移入输入移位寄存器,在起始位0移到最左边时,控制电路进行最后一次移位。当RI=0,且SM2=0(或接收到的第9位数据为1)时,接收到的数据装入接收缓冲器SBUF和RB8(接收数据的第9位),置RI=1,向CPU请求中断。如果条件不满足,则数据丢失,且不置位RI,继续搜索RXD引脚的负跳变。接收的过程如图7所示。 本文来自www.eadianqi.com 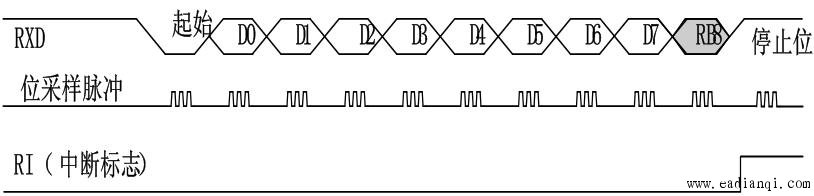 图7 方式2和3的接收 波特率反映串行口传输数据的速率,它取决于振荡频率、PCON寄存器的SCON位以及定时器的设定。在串行通讯中,收发双方的数据传送率(波特率)要遵循一定的约定。AT89S52串行口的四种工作方式中,方式0和2的波特率是固定的,而方式1和3的波特率是可变的,由定时器的溢出率控制。 自动控制网www.eadianqi.com版权所有 方式0为固定波特率:波特率=fosc/12 自动控制网www.eadianqi.com版权所有 方式2可选两种波特率:波特率=(2SMOD/64)×fosc 本文来自www.eadianqi.com 当SMOD=1时,波特率=fosc/32; 自动控制网www.eadianqi.com版权所有
当SMOD=0时,波特率=fosc/64。 本文来自www.eadianqi.com
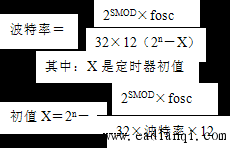
方式1、3为可变波特率,用T1作波特率发生器。 本文来自www.eadianqi.com 波特率=(2SMOD/32)×T1溢出率,T1溢出率为T1溢出一次所需时间的倒数。 自动控制网www.eadianqi.com版权所有
本文来自www.eadianqi.com
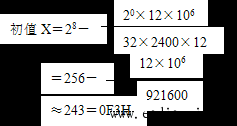
例如:计算波特率。要求用T1工作于方式2来产生波特率2400,已知晶振频率=12MHz。 本文来自www.eadianqi.com
解:求出T1的初值: 自动控制网www.eadianqi.com版权所有
常用波特率和T1初值可参考教材中的表6-2。 在集散式分布系统中,往往采用一台主机和多台从机。其中主机发送的信息可以被各个从机接收,而各从机的信息只能被主机接收,从机与从机之间不能互相直接通信。 本文来自www.eadianqi.com 图8为多机通信连线示意图,系统中左边为主机,其余的为1~n号从机,并保证每台从机在系统中的编号是惟一的。 本文来自www.eadianqi.com 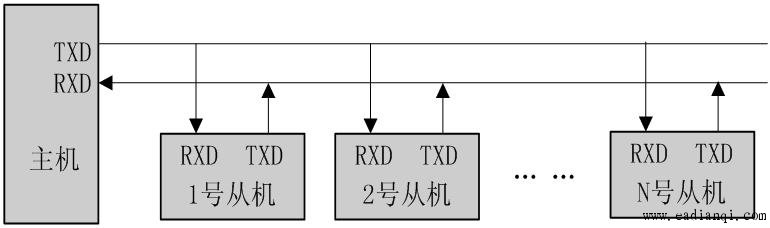 图8 多通信示意图 |
 自动控制网www.eadianqi.com版权所有
自动控制网www.eadianqi.com版权所有