|
机械手在自动化生产线和数控加工中心上都应用的非常普遍。机械手的运动控制是一个典型的步进控制,即控制系统按照固定的步骤,一步接着一步地执行,也就是说只有前一个动作完成后才允许后一个动作发生。
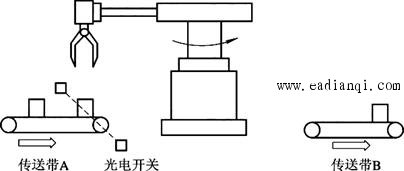
图1是某搬运机械手的工作示意图,其任务是将传送带A上的物品搬送至传送带B上。该机械手有三个动作:升降运动由液压缸驱动,回转运动由液压马达驱动,手爪的松夹运动由另一液压缸驱动。三个动作的正反向运动均由电磁换向阀来改变液流的方向来控制。传送带A和B均由电动机通过机械装置来驱动。机械手一个动作循环的动作顺序如下: 本文来自www.eadianqi.com
原位→下降→抓紧→上升→正转→下降→松开→上升→反转→原位 自动控制网www.eadianqi.com版权所有 机械手的每次循环动作均从原位开始。动作的切换除抓紧/松开由压力继电器和时间控制外,机械手的升降和回转运动均由限位开关控制。 自动控制网www.eadianqi.com版权所有
本文来自www.eadianqi.com
图1 某搬运机械手的工作示意图 自动控制网www.eadianqi.com版权所有
一、控制要求 本文来自www.eadianqi.com (1)机械手在原位时,按下启动按钮,系统启动,传送带A运转。当装在传输带A端部的光电开关检测到物品后,传送带A停止。 本文来自www.eadianqi.com (2)传输带A停止后,机械手进行一次循环动作,把物品从传送带A上搬到连续运转的传送带B上。 本文来自www.eadianqi.com (3)机械手返回原位后,自动启动传送带A运转,进行下一个循环。 本文来自www.eadianqi.com (4)按下停止按钮后,待整个循环完成后,机械手返回原位,才能停止工作。 本文来自www.eadianqi.com 二、I/O通道分配 本文来自www.eadianqi.com 表1 I/O通道分配 本文来自www.eadianqi.com
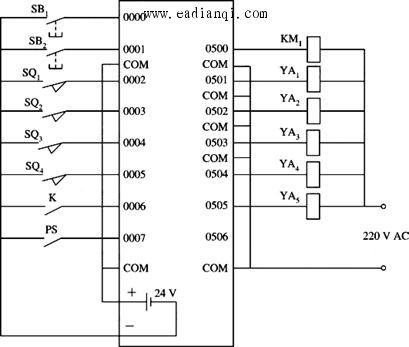
三、I/O接线图 自动控制网www.eadianqi.com版权所有
图2 机械手的I/O接线图 本文来自www.eadianqi.com 四、梯形图程序设计 自动控制网www.eadianqi.com版权所有
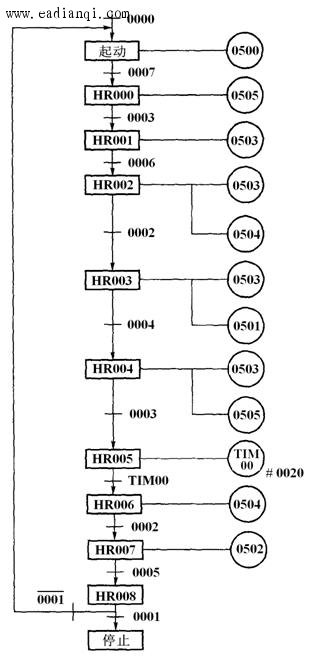
机械手的动作控制是一个典型的步进控制,采用状态流程图可以大大简化梯形图的设计。这里先介绍状态流程图的画法。 自动控制网www.eadianqi.com版权所有
(1)将整个工作过程分为若干个独立的控制功能步,简称步(本例中机械手的工作过程就可以分解成九个独立的步),它是为完成相应的控制功能而设计的独立的控制程序或程序段。 自动控制网www.eadianqi.com版权所有
(2)每个独立的步分别用一个方框表示,然后根据动作顺序将各个步用箭头连接起来。 (4)在每个步的右侧画上要被执行的控制程序。 自动控制网www.eadianqi.com版权所有
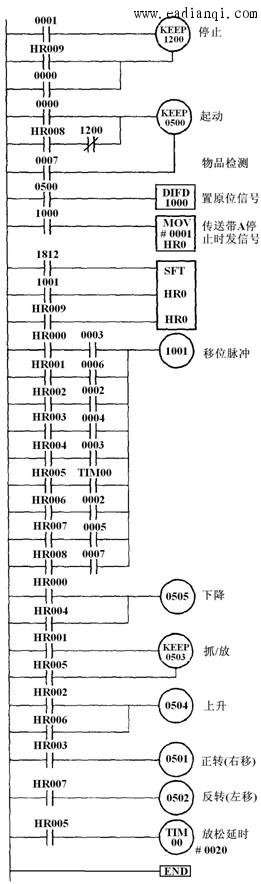
机械手步进控制的状态流程图如图3所示。 本文来自www.eadianqi.com 步进控制在OMRON C系列机型中采用移位寄存器SFT很容易实现,当然不用SFT指令也能实现。图4是用SFT指令来设计的梯形图。 自动控制网www.eadianqi.com版权所有
机械手原位时,按下启动按钮SB1,与其对应的输入点0000为ON,使0500为ON,传送带A运转;当光电开关PS检测到有物品后,0007为ON,使0500为OFF,传送带A停止运行。在0500的后沿,MOV指令将#0001送入HR0通道中,使HR000位为“1”而其余位为“0”,使机械手执行下降的动作。同时,为移位脉冲的产生做好准备。 自动控制网www.eadianqi.com版权所有 机械手下降到位时,下降限位开关0003为ON,发出移位脉冲,使HR001为“1”,HR000为“0”(因为1812为常开继电器),机械手停止下降。此时0503为ON,开始执行抓紧动作。同时,为下一个移位脉冲的产生做准备。 自动控制网www.eadianqi.com版权所有 机械手抓紧到位时,压力继电器K的动合触点闭合,0006为ON,又发出一个移位脉冲,使HR002为“1”,HR001为“0”。此时,0504为ON,机械手紧抓着物品上升。同时,为下一个移位脉冲的产生做准备。 本文来自www.eadianqi.com
机械手上升到位时,上升限位开关0002为ON,又发出一个移位脉冲,使HR003为“1”,HE002为“0”,使0504为OFF,机械手停止上升。此时0501为ON,机械手执行正转动作。同时,为下一个移位脉冲的产生做准备。 本文来自www.eadianqi.com
械手正转到位时,正转限位开关0004为ON,又发出一个移位脉冲,使HR004为“1”,HR003为“0”,使0501为OFF,机械手停止正转。此时0505为ON,机械手执行下降动作。同时,为下一个移位脉冲的产生做准备。 自动控制网www.eadianqi.com版权所有 机械手下降到位时,下降极限开关0003为ON,又发出一个移位脉冲,使HR005为“1”,HR004为“0”,使0505为OFF,机械手停止下降。此时0503被复位,机械手执行放松动作,并且启动定时器TIM01。同时,为下一个移位脉冲的产生做准备。 自动控制网www.eadianqi.com版权所有
在TIM01的定时时间到时,机械手放松到位,又发出一个移位脉冲,使HR006为“1”,HR005为“0”。此时,0504为ON,机械手执行上升动作。同时,为下一个移位脉冲的产生做准备。 自动控制网www.eadianqi.com版权所有
图3 状态流程图 本文来自www.eadianqi.com
自动控制网www.eadianqi.com版权所有
图4 机械手梯形图 本文来自www.eadianqi.com 机械手上升到位时,上升限位开关0002为ON,又发出一个移位脉冲,使HR007为“1”,HR006为“0”,使0504为OFF,机械手停止上升。此时,0502为ON,机械手执行反转动作。同时,为下一个移位脉冲的产生做准备。 自动控制网www.eadianqi.com版权所有 机械手反转到位时,反转限位开关0005为ON,又发出一个移位脉冲,使HR008为“1”,HR007为“0”,使0502为OFF,机械手停止反转。此时,机械手已回到原位,只要在此之前没有按下停止按钮,HR008再次将0500置位,传送带A重新运行,等待物品检测信号0007的到来。同时,为下一个移位脉冲的产生做准备。 本文来自www.eadianqi.com 无论何时按下停止按钮,锁存器1200被置位,使得串接在锁存器0500的置位输入端的1200的动断触点断开,只有在当前循环全部完成后,机械手才能停于原位。 本文来自www.eadianqi.com 机械手的每次循环均是根据光电开关检测到物品后,使传送带A停转,由MOV指令将#0001传送到HR000,开始循环。 本文来自www.eadianqi.com
|

 自动控制网www.eadianqi.com版权所有
自动控制网www.eadianqi.com版权所有