|
一、标注开环极点和零点,纵横坐标用相同的比例尺; 二、实轴上的根轨迹; 三、n-m条渐近线; 四、根轨迹的出射角,入射角; 五、根轨迹与虚轴的交点; 六、根轨迹的分离点,会合点; 结合根轨迹的连续性,对称性,根轨迹的支数,起始点和终 点,闭环极点之和及之积等性质画出根轨迹. 例1 已知系统结构图如图所示,试作多回路系统的根轨迹。 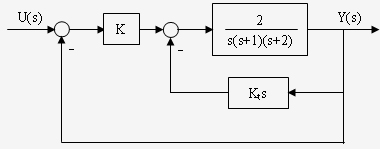 图1 多回路系统结构图 解: 在一般情况下,绘制多回路系统的根轨迹时,首先根据内反馈回路的开环传递函数,绘制内反馈回路的根轨迹,确定内反馈回路的极点分布。然后由内反馈回路的零、极点和内回路外的零、极点构成整个多回路系统的开环零、极点。再按照单回路根轨迹的基本法则,绘制总的系统的根轨迹。 自动控制网www.eadianqi.com版权所有 需要指出,这样绘制出来的根轨迹只能确定多回路系统极点的分布,而多回路系统的零点还需要根据多回路系统闭环传递函数来确定。 下面根据图所示系统,绘制多回路系统的根轨迹。 首先确定内回路的根轨迹。 内回路闭环传递函 内回路特征方程 作 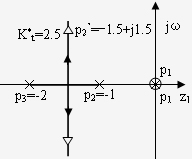 本文来自www.eadianqi.com 本文来自www.eadianqi.com 图4-2 内回路根轨迹 在绘制根轨迹时,开环传递函数的分子分母中若有相同因子时,不能相消,相消后将会丢掉闭环极点。而实际上我们将一对靠得很近的闭环零、极点称为偶极子。偶极子这个概念对控制系统的综合设计是很有用的,我们可以有意识地在系统中加入适当的零点,以抵消对动态过程影响较大的不利极点,使系统的动态过程获得改善。工程上,某极点 内回路当 内回路闭环零、极点确定后,再画K由 多回路系统的开环传递函数应为 1、整个负实轴为根轨迹段 2、渐近线 3、起始角 取 4、求与虚轴的交点 令 多回路系统根轨迹见图4-3所示: 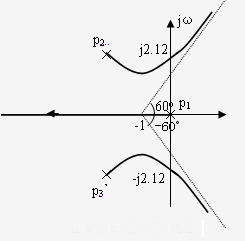 图 4-3 多回路系统根轨 |