|
1、构件: 独立运动的单元体。 组成: 由单个或多个零件刚性构成。 2、构件的自由度: 构件所具有的独立运动的数目。 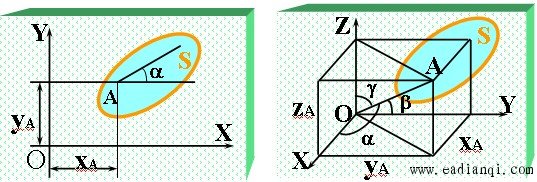 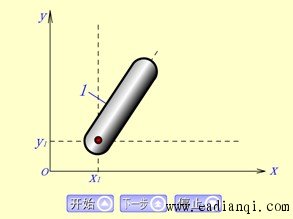 平面机构自由度 3、约束: 对独立运动的限制。 构件的约束数=构件失去的自由度 4、运动副: 两个构件直接接触,并能产生一定相对运动的联接。 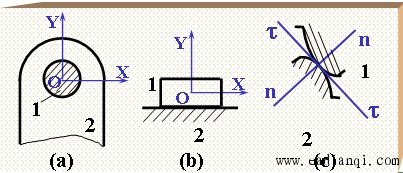 平面运动副分类: 本文来自www.eadianqi.com 根据两构件接触特性常分为: 1.低副:两构件通过面接触组成的运动副。 2.高副:两构过件通点或线接触的组成的运动副。 1.低副:  1)转动副 组成运动副的两构件之间只能绕同一轴线作相对转动,称为转动副或铰链。 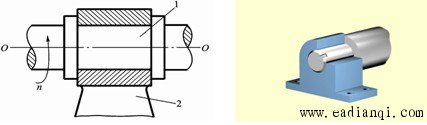 (a)固定铰链 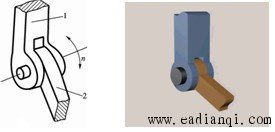 (b)活动铰链
2)移动副
组成运动副的两构件只能沿某一轴线相对移动。 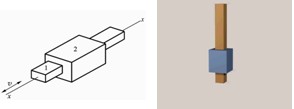 自动控制网www.eadianqi.com版权所有 移动副
低副:
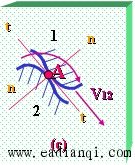
转动副:自由度为1
约束数:为2 
移动副:自由度为1
约束数:为2
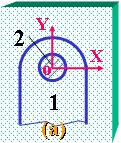
2.高副 两构件以点或线接触而构成的运动副。
 凸轮副
高副
 凸轮副
高副
 自动控制网www.eadianqi.com版权所有 自动控制网www.eadianqi.com版权所有 齿轮副
平面高副:
自由度:为2
约束数:为1
在平面内:
低副:自由度为1,约束数为2 高副:自由度为2,约束数为1
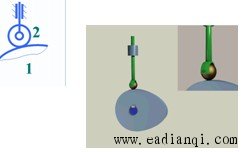
空间运动副
若两构件之间的相对运动均为空间运动,则称为空间运动副。
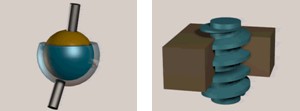 球面副 螺旋副 |