|
��������У�����Է�Ϊ��ԴУ������ԴУ����������ԴУ�����������������λ��ǰУ������λ�ͺ�У���Լ���λ�ͺ�——��ǰУ�������ַ�ʽ�����ڵ��������������������ͬʱ��֤ϵͳ���ȶ��Ժ�ϵͳ��̬���ȶ��õ����ƣ����������ϵͳ���ȶ��Ե�ͬʱ��������ϵͳ��Ӧ��ȷ�ԣ������෴����ˣ�һ�㲻���õ�������������� ��������www.eadianqi.com һ����λ��ǰУ�� ��������www.eadianqi.com
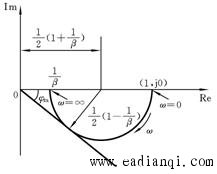
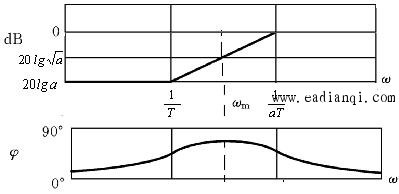
1����λ��ǰУ������ �Զ�������www.eadianqi.com��Ȩ���� ������λ��ǰ���ڵĴ��ݺ���������ʽ��ʾ ��������www.eadianqi.com
�Զ�������www.eadianqi.com��Ȩ����
����ʽ�У�
��������λ��ǰ���ڵ�Ƶ������Ϊ��
�������У���Ƶ����Ϊ �����ɼ���λ��ǰ�����ķ�Ƶ����Ϊ�� ��������www.eadianqi.com
�Զ�������www.eadianqi.com��Ȩ����
������ �Զ�������www.eadianqi.com��Ȩ����
�Զ�������www.eadianqi.com��Ȩ���� ͼ1 �Զ�������www.eadianqi.com��Ȩ����
�����ɼ���
���˻��ڵ������λ��ǰ��Ϊ
�Զ�������www.eadianqi.com��Ȩ����
������֪���� ��������www.eadianqi.com
����ͼ3����λ��ǰ���� ��������www.eadianqi.com
�Զ�������www.eadianqi.com��Ȩ����
������ ��������www.eadianqi.com
��������www.eadianqi.com ������Ȼ�� �Զ�������www.eadianqi.com��Ȩ����
�������ڶ�������ͼ�ϣ�
ͼ2 �Զ�������www.eadianqi.com��Ȩ����
ͼ3 ��������www.eadianqi.com
��������������λ��ǰУ�����ں����ڸû����ڶ�����Ƶ�������� �Զ�������www.eadianqi.com��Ȩ����
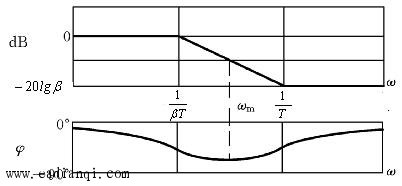
2������Bodeͼ������λ��ǰУ�� �Զ�������www.eadianqi.com��Ȩ���� ����������λ��ǰУ����һ����Ʋ���Ϊ�� ��������www.eadianqi.com
������1������ϵͳ��̬����Ҫ��ȷ��ϵͳ�Ŀ�������
������2������ȷ�� �Զ�������www.eadianqi.com��Ȩ����
������3������ָ���Ҫ��ȷ����ϵͳ����Ҫ���ӵ���dz�ǰ��
������4����ʽ��6.3.2��ȷ�� �Զ�������www.eadianqi.com��Ȩ����
������5��ȷ����ǰУ�����ڵ�ת��Ƶ�� ������6�����㡣 ��������www.eadianqi.com 3����λ��ǰУ�����ص� ��������www.eadianqi.com
������1����λ��ǰУ����Ҫ��δУ��ϵͳ����Ƶ�ε����Խ���У������ȷ��У����ϵͳ���нϸߵ���λԣ�ȼ���Ƶ��б�ʵ��� ������2����ǰУ���������ϵͳ��Ӧ�Ŀ����ԡ���λ��ǰУ������У��ʹϵͳ��ֹƵ���������ϵͳ����Ӧ�ٶȡ������Ŵ���������ϵͳ�����������½��� ��������www.eadianqi.com
������3������ϵͳ��������ʹζ�δ�仯����˶�ϵͳ����̬���������Ը��ơ� �Զ�������www.eadianqi.com��Ȩ���� ������4����λ��ǰУ�������÷�Χ�����ơ������δУ��ϵͳ�Ľ�ֹƵ�ʸ�������Ƶ���Եı仯�ʺܴ���Ǽ�С�úܿ죬����õ�����λ��ǰУ����Ч��������������Ϊ����У����Ľ�ֹƵ�����Ƶ�ε��ƶ�������ڸ�������С�úܿ죬�������µĽ�ֹƵ���ϱ���ѵõ��㹻�����λԣ�ȡ� ��������www.eadianqi.com ������λ�ͺ�У�� �Զ�������www.eadianqi.com��Ȩ���� 1����λ�ͺ�У������ �Զ�������www.eadianqi.com��Ȩ����
������λ�ͺ�У�����ڿ�����ʽ��ʾ��
ʽ�У�
��������λ�ͺڵ�Ƶ������Ϊ �Զ�������www.eadianqi.com��Ȩ����
���У���Ƶ����Ϊ �Զ�������www.eadianqi.com��Ȩ����
�����ɼ���λ�ͺ����ķ�Ƶ����Ϊ �Զ�������www.eadianqi.com��Ȩ����
��������www.eadianqi.com
������ �Զ�������www.eadianqi.com��Ȩ����
��������www.eadianqi.com
�Զ�������www.eadianqi.com��Ȩ����
ͼ.4 ��������www.eadianqi.com
�����ɼ���
�������˻��ڵ������λ�ͺ��Ϊ ��������www.eadianqi.com
������ͼ4��5��֪,�ͺ�У��������һ����ͨ���ڣ����к�ǿ�ĸ�Ƶ˥�����á��û���У����ԭ���ǣ�������ϵͳ�Ŀ�������ʱ�����Ƶ�����������ƣ�����Ƶ���������䡣��ʱ�������֤
��������www.eadianqi.com ͼ.5 �Զ�������www.eadianqi.com��Ȩ����
2������Bodeͼ������λ�ͺ�У�� �Զ�������www.eadianqi.com��Ȩ����
����������������λ�ͺ�У����Ҫ�����ͺ�У�����ڵĸ�Ƶ��ֵ˥�����ԣ�ʹ��ֹƵ���½����� ����������λ�ͺ�У����һ����Ʋ���Ϊ�� �Զ�������www.eadianqi.com��Ȩ����
������1������ϵͳ��̬����Ҫ��ȷ��ϵͳ�Ŀ�������K�� �Զ�������www.eadianqi.com��Ȩ����
������2����
������3���� ������4����λ�ͺ�У�����ڵ����ת��Ƶ��ѡΪ������У��ϵͳ�ļ���Ƶ�ʵ�5~10���� ��������www.eadianqi.com
������5���� �Զ�������www.eadianqi.com��Ȩ����
3����λ�ͺ�У�����ص� ��������www.eadianqi.com ������1��������λ�ͺ�У����������Ҫ�������ϵͳ�Ŀ����Ŵ�ϵ�����Ӷ�����ϵͳ����̬���ܣ�����ϵͳԭ�еĶ�̬���ܲ���������Ӱ�졣��ˣ���Ҫ����δУ��ϵͳ�Ķ�̬���܌�����������ָ���Ҫ��ֻ��Ҫ���ӿ������������ϵͳ���ƾ��ȵ�һЩϵͳ�С� �Զ�������www.eadianqi.com��Ȩ���� ������2���ͺ�У�����ڱ�������һ�ֵ�ͨ�˲�������ˣ����ͺ�У�����ϵͳ�Ե�Ƶ���źž��нϸߵķŴ�������������ɽ���ϵͳ����̬�����Ը�Ƶ�ε��źţ�ϵͳȴ���ֳ�������˥�����ԡ��������п�����ϵͳ�з�ֹ���ȶ�����ij��֡�Ӧ�ر�ע�⣬������λ�ͺ�У�����������Ը�Ƶ�źŵ�������ԣ�����������������ͺ�����ԡ���ˣ�Ӧ����ԭϵͳ�ĵ�Ƶ�Ρ� ��������www.eadianqi.com ������3����λ�ͺ�У��������ϵͳ����Ӧ�Ŀ����ԡ����ڲ�������λ�ͺ�У������У��ʹϵͳ������խ����˵�����ͺ�У�������ϵͳ�Ķ�̬����ƽ���Է����нϺõ�Ч����ϵͳ������������ǿ����ϵͳ����Ӧ�ٶȽ��͡� �Զ�������www.eadianqi.com��Ȩ����
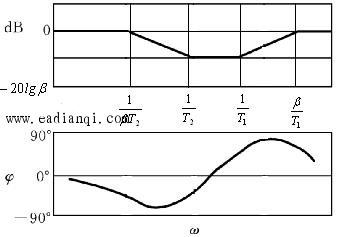
������λ�ͺ�—��ǰУ�� �Զ�������www.eadianqi.com��Ȩ���� 1����λ�ͺ�—��ǰ���� ��������www.eadianqi.com ������λ�ͺ�—��ǰ���ڿ�����ʽ��ʾ �Զ�������www.eadianqi.com��Ȩ����
����ʽ�У� ��������www.eadianqi.com
��������λ��ǰ���ڵ�Ƶ������Ϊ ��������www.eadianqi.com
��������www.eadianqi.com �����ɼ���ʽ��ǰһ�������λ��ǰУ������һ�������λ�ͺ�У���� �Զ�������www.eadianqi.com��Ȩ����
��������www.eadianqi.com
ͼ6 �Զ�������www.eadianqi.com��Ȩ����
����ͼ6����λ�ͺ�—��ǰ���ڵ�Bodeͼ����ʱ�� ��������www.eadianqi.com 2������Bodeͼ������λ�ͺ�-��ǰУ�� �Զ�������www.eadianqi.com��Ȩ���� ����������λ�ͺ�—��ǰУ����һ����Ʋ���Ϊ�� �Զ�������www.eadianqi.com��Ȩ����
������1������ϵͳ��̬����Ҫ��ȷ��ϵͳ�Ŀ�������K������ȷ��Kֵ�������£�����δУ��ϵͳ�ķ�ֵ��ԽƵ�� �Զ�������www.eadianqi.com��Ȩ����
������2��������Ӧ�ٶȵ�Ҫ��ѡȡУ����ķ�ֵ��ԽƵ�� ��������www.eadianqi.com
������3������ѡ���� �Զ�������www.eadianqi.com��Ȩ����
������4��ΪʹУ����ϵͳ�Ķ�����Ƶ���������� �Զ�������www.eadianqi.com��Ȩ����
�Զ�������www.eadianqi.com��Ȩ����
����ʽ�С� |

 ����δУ��ϵͳ�Ķ�����Ƶ����ͼ���ҵ���ֵ����
����δУ��ϵͳ�Ķ�����Ƶ����ͼ���ҵ���ֵ����