|
一、系统误差与偏差的关系 自动控制网www.eadianqi.com版权所有
设
自动控制网www.eadianqi.com版权所有
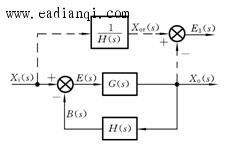
在如图1所示的闭环系统中,系统误差 自动控制网www.eadianqi.com版权所有
本文来自www.eadianqi.com
图1 自动控制网www.eadianqi.com版权所有
显然,控制系统的误差 二、系统的稳态误差与稳态偏差 本文来自www.eadianqi.com 系统过渡过程结束后,系统实际输出量与系统希望的输出量之间的偏差称为稳态误差。它是系统稳态性能的测度,反映了系统响应的准确性。 本文来自www.eadianqi.com
同样地,可以定义稳态偏差 三、与输入和系统结构有关的稳态偏差 自动控制网www.eadianqi.com版权所有
本文来自www.eadianqi.com
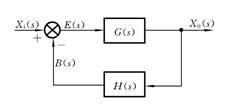
图2 本文来自www.eadianqi.com
现分析如图3.6.2所示系统的稳态偏差 自动控制网www.eadianqi.com版权所有
因 自动控制网www.eadianqi.com版权所有
由终值定理的系统的稳态偏差为: 自动控制网www.eadianqi.com版权所有
自动控制网www.eadianqi.com版权所有
即 本文来自www.eadianqi.com 很显然,系统的稳态偏差不仅与系统的结构、参数有关,而且与系统的输入的特性有关。为简化稳态偏差的计算,定义 本文来自www.eadianqi.com
位置无偏系数
速度无偏系数 本文来自www.eadianqi.com
加速度无偏系数 则: 自动控制网www.eadianqi.com版权所有
(1)当系统的输入为单位阶跃信号时,系统的稳态偏差为 本文来自www.eadianqi.com
(2)当系统的输入为单位斜坡信号时,系统的稳态偏差为 自动控制网www.eadianqi.com版权所有
(3)当系统的输入为单位加速度信号时,系统的稳态偏差为
设系统的开环传递函数为 自动控制网www.eadianqi.com版权所有
其中, 表1 不同型次系统的误差系数及其在不同输入时的稳态偏差 本文来自www.eadianqi.com
从表1中可以看出,同一系统在不同的输入作用下,其稳态偏差是不同的。更有意义的是,针对同一种输入,当系统的型次增加时,系统的准确性将得到提高;增加系统的开环增益,往往也可以提高系统的稳态精度。但是,正如第五章将要讨论的那样,系统型次和开环增益的增加,却使得系统的稳定性变差。因此,通常需要在系统的稳定性和准确性之间进行权衡,必要时,需要引入校正环节进行校正。 自动控制网www.eadianqi.com版权所有 四、系统存在干扰作用时误差和偏差 自动控制网www.eadianqi.com版权所有
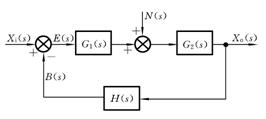
若系统有干扰 自动控制网www.eadianqi.com版权所有
自动控制网www.eadianqi.com版权所有
式中,
本文来自www.eadianqi.com
图.3 本文来自www.eadianqi.com 因此,系统的误差包括两部分,一部分与系统的结构、参数和输入信号有关,另一部分为系统在干扰单独作用下产生的输出。 本文来自www.eadianqi.com
在输入和干扰共同作用下的偏差为 自动控制网www.eadianqi.com版权所有
由式(2)、(3)及终值定理可得在输入和与干扰共同作用下,系统的稳态误差和稳态偏差。 本文来自www.eadianqi.com
五、任意输入时,稳态误差的求法 本文来自www.eadianqi.com (1)求系统偏差的Laplace变换。 本文来自www.eadianqi.com (2)对于单位反馈系统,稳态误差等于稳态偏差。 自动控制网www.eadianqi.com版权所有 (3)对于非单位反馈系统,可根据式(3.6.1)将误差的Laplace变换换算为偏差Laplace变换的表达式。 本文来自www.eadianqi.com (4)根据终值定理,即可求得系统的稳态误差。 本文来自www.eadianqi.com
当然,系统的稳态误差还可以通过求出系统的时间响应,进而求出系统的误差函数 本文来自www.eadianqi.com |
|||||||||||||||||||||||||||||||||||
 (3)
(3)