|
1������ϵͳ�ĵ�λ��Ҫ�� ����ϵͳ������һ�廯��Ʒ����Ҫ����ɲ��֣��൱���˵�“����”��ʵ�ֿ��Ƽ���Ϣ�������ܡ� �Կ���ϵͳ�Ļ���Ҫ�� �����������涨�Ĺ��ɱ仯������ϵͳ�߱��ȶ��ԡ������ԡ�ȷ�� 2������ϵͳ�Ļ������� ����ϵͳ���ɿ���װ�á�ִ�л��������ض����װ�������ɵ����壬�����������ͼ��ʾ�� ���ض�������ǻ����豸������������һ�ֹ��̣��绯���������̣��ȣ����ڿ���װ�õĿ����£�ִ�л����������£���Ԥ���Ĺ��ɻ�Ŀ�����С� ��ȫ�Զ�ϴ�»�����ϵͳ�븴�ӵĺ���ɻ�����ϵͳ��ԭ�������ƣ����ڽṹ���Ǻܲ���ͬ�ġ�����ͼΪ���Դ�����������ϵͳ����ɡ� �Զ�������www.eadianqi.com��Ȩ����  3������ϵͳ�Ļ������� ���ݻ���һ�廯ϵͳ�Ķ����Լ������Ծ����˿������Ķ����ԣ�һ��������������������ͣ� ���ֿ���ϵͳ��NCS�� �����ӹ�����ļ�����Ϣ������Ϣ���ֻ������涨�Ĵ����ʽ��ɼӹ������ɼ��������������ʽ��ָ������������˶���һ�ֿ�����ʽ����ʵ�����ǹ켣���Ƶ����⡣  ���ƽ��ʣ���������ļӹ���Ϣ ����װ�ã������Ϣ�����롢�洢���任�����㼰���ֿ��ƹ��� �ŷ�ϵͳ������ָ����������ִ�л����������źŵ���е��ת���� ���װ�ã�����ٶȺ�λ�ƣ���������Ϣ �Զ�������www.eadianqi.com��Ȩ���� �ŷ�����ϵͳ��SCS�� ����Ϊģ������ֵĵ��źţ�����ǻ�е��λ�ƻ��ٶȵı仯�ʣ���Ҫ��������ȶ��ġ����ٵġ�ȷʵ��ָ��Ĺ���Ҫ��Ҫʹ�������һ���ľ��ȸ����������ı仯������Ϊ�������ơ� 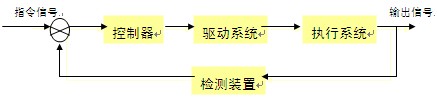 ˳�����ϵͳ ��ϵͳ���ÿ��ؿ��Ʒ�ʽ����������Ŀ�����һϵ�����뿪�������ĺ������������Բ������̵�“��״̬”���п��ƣ�ʵ��˳����Ƶķ����л���ʽ�̵��������������� ���̿���ϵͳ ��ұ�𡢻��������������������в��õĹ�ҵ����ϵͳ�����̿���ϵͳ���ܿر������������̵��������������������ġ���ɢ�ġ� ��������www.eadianqi.com 4��ϵͳ��ѧģ�� ����ϵͳ����ѧģ���ڿ���ϵͳ���о��������൱��Ҫ�ĵ�λ��Ҫ��ϵͳ���з��洦��������Ӧ��֪��ϵͳ����ѧģ�ͣ�Ȼ��ſ��Զ�ϵͳ����ģ�⡣ ��ѧģ��������Ԫ��֮�䡢��ϵͳ֮�䡢���֮��������Լ�ϵͳ�뻷������õ���ѧ����ʽ�����Ǹ���ϵͳ�Ķ�̬���ԣ���ͨ������ϵͳ����������ѧ���ɣ����е�p�����p�����pҺѹ�p (1)������——���ģ�� ��������——�������ѧģ�ͣ������ַ�����������ϵͳ��ʱ���еĶ�̬���ԡ� (2)��״̬ģ�� 5�����ݺ��� ����ϵͳ��ѧģ�͵�Ŀ����Ϊ�˶�ϵͳ�����ܽ��з������ڸ��������ü���ʼ�����£�����ַ��̾Ϳ��Եõ�ϵͳ�������Ӧ�����ַ����Ƚ�ֱ�ۣ��ر��ǽ����ڵ��Ӽ��������Ѹ�ٶ�ȷ����ý���� �����Զ���ϵͳ�����������Գ��ַ��������� ��������www.eadianqi.com 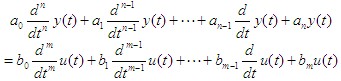 ���ݺ��������������ʣ� �ٴ��ݺ����Ǹ��������������ʽ���������и��亯�����������ʡ� �ڴ��ݺ�����ϵͳ��Ԫ����ѧģ�͵���һ����ʽ����һ����ϵͳ������ʾ�������������֮���ϵ�ı���ʽ�� �۴��ݺ������ַ�������ͨ�ԡ� �ܴ��ݺ��������Ϸ��任��������Ӧ�� ���ͻ��ڵĴ��ݺ���: һ������ϵͳ��������Ԫ����϶��ɵġ���Ȼ����Ԫ���ľ���ṹ������ԭ���Ƕ��ֶ����ģ������������ṹ�������ص㣬�о����˶����ɺ���ѧģ�͵Ĺ��ԣ��Ϳ��Ի��ֳ�Ϊ������ļ��ֵ��ͻ��ڡ� ��Щ���ͻ����ǣ��������ڡ��ֻ��ڡ����ֻ��ڡ������ֻ��ڡ�һ���Ի��ڡ��������ں��ӳٻ��ڡ� ��1������������ ���������ֳƷŴڣ����������������֮��Ĺ�ϵΪһ�̶ֹ��ı�����ϵ�������˵������������ܹ���ʧ�桢���ͺ�ذ�һ���ı������������� ��������www.eadianqi.com ��2�����ֻ��� �ֻ������Զ�����ϵͳ�о���Ӧ�õĻ��ڡ��ֻ��ڵ��ص�������̬�����У������Ϊ���������� ��3�������ֻ��� ���ֻ��ڵĶ�̬����Ϊ ��4����һ���Ի��� �Զ�����ϵͳ�о������������ֻ��ڣ����ֻ��ھ���һ������Ԫ���� ��5������������ �������ڵ��ַ���Ϊ ��6�����ӳٻ��� �ӳٻ��ڵ��ص��ǣ�������źű������źųٺ�һ����ʱ�䡣����ѧ����ʽΪ �Զ�������www.eadianqi.com��Ȩ���� |