|
1.PID���������Ļ������� ������PID���������������Է�Ϊʱ���������������������ࡣʱ�������������Ziegler��Nichol�����Z-N��Ծ��Ӧ������ʵ�ʵ�Ӧ���д�ͳ��Z-N�����������Ŷ������ͣ��������Cohen.Coon����CHR��������CHR��������ͨ���ı��Ծ��Ӧ�Եó��Ϻõıջ����Ե�һ�ַ����� 2.����ʵ�� Ϊ�˸���ϵͳ�����ܣ���ϵͳ���������磺 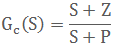 �Ĵ���У�����磬�Ը���ϵͳ�ıջ����㡣���ǣ�GcͬʱҲ����ϵͳ�ջ����ݺ���������һ���µ���㡣������������϶�������Ӱ��ջ������Ķ�̬���ܡ���ʱҪ������ϵͳ�����봮��һ��ǰ���˲����������������ջ����IJ���Ӱ�졣 �Ĵ���У�����磬�Ը���ϵͳ�ıջ����㡣���ǣ�GcͬʱҲ����ϵͳ�ջ����ݺ���������һ���µ���㡣������������϶�������Ӱ��ջ������Ķ�̬���ܡ���ʱҪ������ϵͳ�����봮��һ��ǰ���˲����������������ջ����IJ���Ӱ�졣�����ǰ���˲����Ŀ���ϵͳ��ͼ1��ʾ�����ض���Ϊ  ��У������ΪPI��������ǰ���˲���Ϊ ��У������ΪPI��������ǰ���˲���Ϊ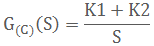 ��ϵͳ�������ҪΪ����ϵͳ�����Ϊ0.707���ڽ�Ծ��Ӧ�ij������Q5%���۽�Ծ��Ӧ�ĵ���ʱ��Q 0.6s�� ��������www.eadianqi.com ��ϵͳ�������ҪΪ����ϵͳ�����Ϊ0.707���ڽ�Ծ��Ӧ�ij������Q5%���۽�Ծ��Ӧ�ĵ���ʱ��Q 0.6s�� ��������www.eadianqi.com  ͼ1 ��ǰ���˲����Ŀ���ϵͳ��ͼ �����K1��K2��ǰ���˲����� �⣺����ͼ1ϵͳ��ͼ�ɵ�ϵͳ�ıջ����ݺ���Ϊ 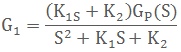 ;ϵͳ�ıջ����ݺ���Ϊ ;ϵͳ�ıջ����ݺ���Ϊ ����ϵͳ������Ⱥ͵���ʱ���Ҫ���������Ϊ0.707������ts��0.6s �Զ�������www.eadianqi.com��Ȩ���� �����ξWn�R7.33��ȡξWn =8����Wn=11.312.�������PI���������Ϊ�� 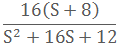 ;���ǣ���ǰ���˲���ʱ��ϵͳ������ʱ��Ϊ0.07s����ֵʱ��Ϊ0.2s��������Ϊ20.2%������ʱ��Ϊ0.54s����Ȼ����������������Ӱ�죬������������Ҫ�� ;���ǣ���ǰ���˲���ʱ��ϵͳ������ʱ��Ϊ0.07s����ֵʱ��Ϊ0.2s��������Ϊ20.2%������ʱ��Ϊ0.54s����Ȼ����������������Ӱ�죬������������Ҫ�����Dz���ǰ���˲���Gp(s)�������ջ����ݺ����е���㣬��ͬʱ����ϵͳԭ�е�ֱ�����治�䣬Ϊ��ȡ  ���ջ����ݺ������ ���ջ����ݺ������ ����ʱ��Ϊ0.29s����ֵʱ��Ϊ0.39s��������Ϊ4.3%������ʱ��Ϊ0.55s |