|
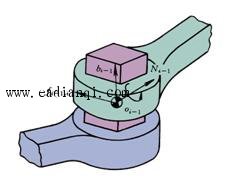
工业机器人力学分析包括静力学分析和动力学分析。静力学分析是研究操作机在静态工作条件下,手臂的受力情况;动力学分析是研究操作机各主动关节驱动力与手臂运动的关系,从而得出工业机器人动力学方程。 (一) 静力学分析 1. 静力平衡方程 2. 关节力和关节力矩 为了使操作机保持静力平衡,需要确定驱动器对相应杆件的输入力和力矩与其所引起的操作机手部力和力矩之间的关系。
图1 移动关节上的关节力 自动控制网www.eadianqi.com版权所有 自动控制网www.eadianqi.com版权所有
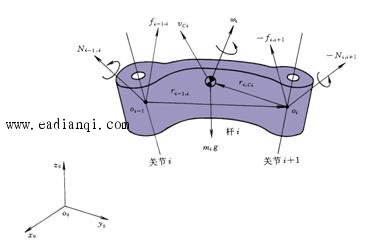
(二) 动力学分析
图2 杆件 动力学方程的建立 自动控制网www.eadianqi.com版权所有 |
 自动控制网www.eadianqi.com版权所有
自动控制网www.eadianqi.com版权所有