|
一、手臂
手臂是操作机中的主要运动部件,它用来支承手腕和手部,并用来调整手部在空间的位置。 本文来自www.eadianqi.com
 本文来自www.eadianqi.com 本文来自www.eadianqi.com
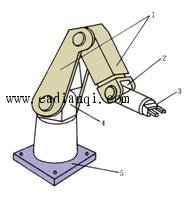
图1 工业机器人操作机
1—手臂 2—腕关节 3—手部 4—立柱 5—机座 本文来自www.eadianqi.com
二、手腕
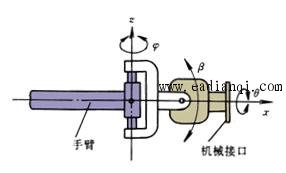
手腕是联接手臂和手部的部件,其功能是在手臂和腰部实现了手部在空间的三个位置坐标(自由度)的基础上,再由手腕来实现手部在作业空间的三个姿态(方位)坐标,即实现三个旋转自由度。通过机械接口联接并支承的手部。 本文来自www.eadianqi.com
 |
 |
|
a) |
b) |
|
图2手腕的自由度 |
下面介绍几种典型手腕结构。
(1) 具有三个自由度的工业机器人手腕
(2) 具有回转和摆动两个自由度的手腕
(3) 上部为链传动的手腕a) |
 |
|
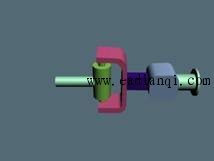
图3 手腕关节 |
三、手部 本文来自www.eadianqi.com
手部装在操作机手腕的前端,它是操作机直接执行工作的装置。根据其用途和结构的不同可以分为机械夹持器、专用工具和万能手三类。
(一) 机械夹持器
机械夹持器可分为回转式和移动式两类。回转式又可分为单支点回转式和双支点回转式。按夹持方式可分为外夹式和内撑式。 自动控制网www.eadianqi.com版权所有
-
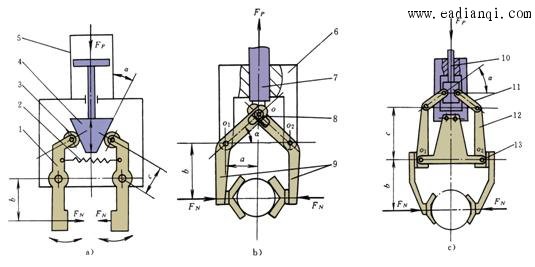
1. 回转式机械夹持器
本文来自www.eadianqi.com
 |
|
a) 楔块杠杆式回转型夹持器 |
b) 滑槽杠杆式回转型夹持器 |
c) 连杆杠杆式回转型夹持器 |
图4 回转式机械夹持器
1、9—杠杆 2—弹簧 3—滚子 4—楔块 5—驱动器 6—支架 7、10—杆
8—圆柱销 11—连杆 12—摆动钳爪 13—调整垫片 |
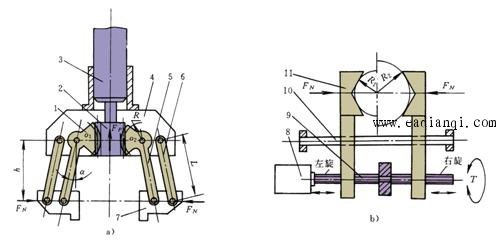
2. 移动式机械夹持器 本文来自www.eadianqi.com
 |
|
a)齿轮齿条平行连杆式平移型夹持器 |
b)左右旋丝杠平移型夹持器 |
图5 移动式机械夹持器
1—扇形齿轮 2—齿条杆 3—电磁式驱动器 4—夹持器体 5、6—连杆
7—钳爪 8—电动机 9—丝杠 10—导轨 11—钳爪杆 |
3. 内撑式机械夹持器 本文来自www.eadianqi.com
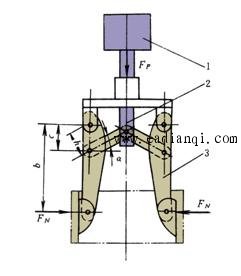
图 6 内撑连杆杠杆式夹持器
1—驱动器 2—杆 3—钳爪 自动控制网www.eadianqi.com版权所有
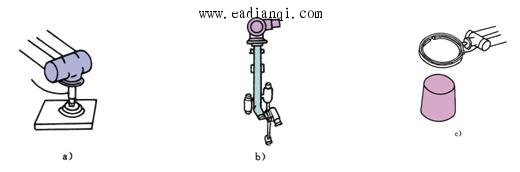
(二) 专用工具
专用工具是供工业机器人完成某类特定的作业之用。 本文来自www.eadianqi.com
 |
|
a) 真空吸附手 |
b) 喷枪 |
c) 空气袋膨胀手 |
 |
|
d) 弧焊焊枪 |
e) 电磁吸附手 |
f) 点焊枪 |
|
图7 专用工具 |
|