|
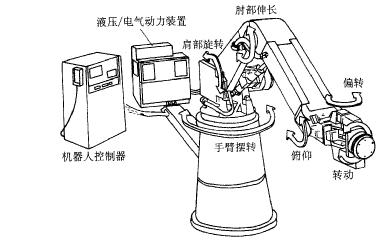
工业机器人一般由主构架(手臂)、手腕、驱动系统、测量系统、控制器及传感器等组成。图1是工业机器人的典型结构。机器人手臂具有3个自由度(运动坐标轴),机器人作业空间由手臂运动范围决定。手腕是机器人工具(如焊枪、喷嘴、机加工刀具、夹爪)与主构架的连接机构,它具有3个自由度。驱动系统为机器人各运动部件提供力、力矩、速度、加速度。测量系统用于机器人运动部件的位移、速度和加速度的测量。控制器(RC)用于控制机器人各运动部件的位置、速度和加速度,使机器人手爪或机器人工具的中心点以给定的速度沿着给定轨迹到达目标点。通过传感器获得搬运对象和机器人本身的状态信息,如工件及其位置的识别,障碍物的识别,抓举工件的重量是否过载等。
本文来自www.eadianqi.com 图1 工业机器人的典型结构 本文来自www.eadianqi.com
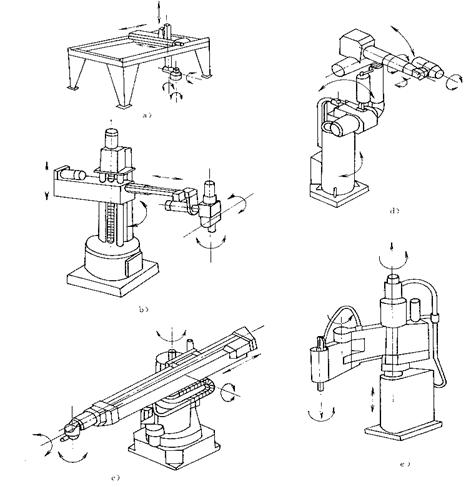
工业机器人运动由主构架和手腕完成,主构架具有3个自由度,其运动由两种基本运动组成,即沿着坐标轴的直线移动和绕坐标轴的回转运动。不同运动的组合,形成各种类型的机器人(如图2):①直角坐标型(如图2a是三个直线坐标轴);②圆柱坐标型(如图2b是两个直线坐标轴和一个回转轴);③球坐标型(如图2c是一个直线坐标轴和两个回转轴);④关节型(如图2d是三个回转轴关节和8-17e是三个平面运动关节)。 本文来自www.eadianqi.com
图2 工业机器人的基本结构形式 本文来自www.eadianqi.com a)直角坐标型 b)圆柱坐标型 c)球坐标型 d)多关节型 e)平面关节型 本文来自www.eadianqi.com |
 本文来自www.eadianqi.com
本文来自www.eadianqi.com