|
�۴���Ҫ�����ӹ�����������Ŀף�һ������ʽ�۴��������۴����֡� ��������www.eadianqi.com T68����ʽ�۴���Ҫ������ס��ۿס��¿��ӹ���ƽ��ȣ�ʹ��һЩ���������Գ������ơ� �Զ�������www.eadianqi.com��Ȩ���� T68����ʽ�۴���Ҫ�ɴ�����ǰ��������ͷ�ܡ�����̨����������β���Ȳ�����ɡ�������һ������������������һ�˹̶���ǰ������ǰ�����Ĵ�ֱ������װ����ͷ�ܣ���ͷ�ܿ����ŵ��촹ֱ�ƶ�����ͷ���O�е�װ�����Ჿ�֡������䡢����������ݻ����Ȳ������������߹̶�������ǰ�˵��ο����װ�ڻ��̵ĵ�������ϣ��ڹ��������У�����һ����ת��һ���������������˶�������ֻ����ת��װ������ĵ�����������ֱ���������߷���ľ�������˶�������ͻ���������ͨ�������Ĵ����������ģ���˿��Զ���ת�����ڴֹ��������ʹ������ӹ���ֻ�����ó�����������ʱ��ʹ�û��̡� ��������www.eadianqi.com ��������β������֧��װ���������ϵ��۸�ĩ�ˣ�������ͷ��ͬʱ���������ߵ�����ʼ����һֱ���ϡ����������ش�����������������߷������λ�á� ��������www.eadianqi.com ��װ�����Ĺ���̨�����ڴ����в��ĵ����ϣ���������塢������빤��̨��ɣ����������ش��������������ƶ�����������������ϵĵ����������ƶ�������̨����������ɻ�ת�����������ͷ�ܵĴ�ֱ�ƶ�������̨�ĺ��������ƶ��ͻ�ת���Ϳɼӹ�������һϵ�����������ƽ�л�ֱ�Ŀס� �Զ�������www.eadianqi.com��Ȩ����
���Ϸ�����֪T68��ʽ�۴����˶���ʽ�У� �Զ�������www.eadianqi.com��Ȩ���� ���˶����������ת�˶��ͻ��̵���ת�˶��� ��������www.eadianqi.com
��������www.eadianqi.com �����˶����������������������ϵ��ߵľ����������ͷ�ܵĴ�ֱ����������̨�ĺ����������������� ��������www.eadianqi.com �����˶�������̨�Ļ�ת���������������ƶ���β�ܵĴ�ֱ�ƶ��������ֵĿ����ƶ��� ��������www.eadianqi.com ������ͼ��ʾΪT68����ʽ�۴�������������·ͼ������Ҫ�ص��У�����1�������нϴ�ĵ��ٷ�Χ�����á�/YY˫�������첽�綯����Ϊ���϶��綯���������û������ϵ��١�����ʱ����������ӳ������Σ�����ʱ�ӳ�˫���Ρ����綯���ڵ���ʱ��ֱ������������ʱ�Ƚ�ͨ�����پ���ʱ��ͨ���١� �Զ�������www.eadianqi.com��Ȩ���� ��2����е����ʱ��Ϊʹ���Ƴ���˳��������������λ�ã����е��ٻ�������ٳ嶯�� ��������www.eadianqi.com ��3�����綯����ʵ����ת����ת������תʱ�ĵ㶯���ơ�Ϊ�����������ƶ��������ڵ㶯���ƶ�ʱ���������鴮���������衣 �Զ�������www.eadianqi.com��Ȩ���� ��4��Ϊʹ����Ѹ�١�ȷͣ��������綯�����÷����ƶ��� ��������www.eadianqi.com
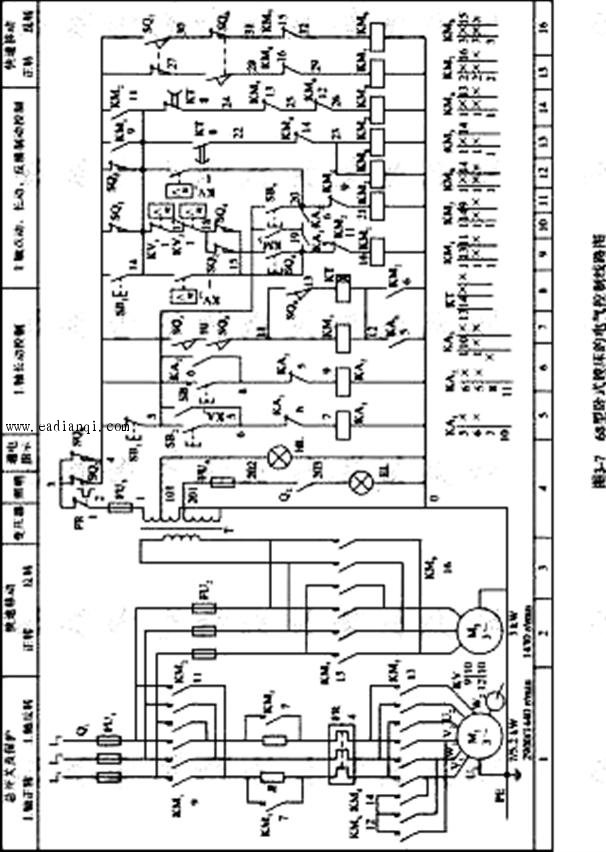
��5��Ϊ���̸���ʱ�䣬��Ӧ�п����ƶ�����һ̨�����ƶ��綯����ʵ�ֿ����˶��� ��������www.eadianqi.com ��6��������Ľ��������������̾������ᴹֱ������̨������̨������������ �Զ�������www.eadianqi.com��Ȩ���� һ������· ��������www.eadianqi.com ��������ͼ3-7�У�M1Ϊ����������綯��������һ̨4/2����˫�ٵ綯��������ӷ�Ϊ��/YY��M2Ϊ�����ƶ��綯�����綯��M1��6ֻ�Ӵ������ƣ�����KM1��KM2Ϊ����ת�Ӵ�����KM3Ϊ�ƶ�����̽ӽӴ�����KM4Ϊ������ת�Ӵ�����KM5��KM6Ϊ������ת�Ӵ���������綯������תͣ��ʱ�������ٶȼ̵���KS����ʵ�ַ����ƶ���������ж�·������һ�㳤�ڹ��ر�����M1��������������ٵ㶯������������ٻ���ٳ���������ͣ��ʱ���÷����ƶ���Ϊ���Ƶ㶯���ƶ��������ڵ��ٵ㶯�ͳ���ͣ�������ƶ�ʱ��M1�Ķ������鴮�����R��M1����ȫѹ������ҪM1��������ʱ��Ϊ���������������Ⱦ�����ȫѹ����������ʱ����ȫѹ����תΪȫѹ���١�Ϊ��֤���ᡢ������е����ʱ�����������ϣ���M1��ת����ʱ���ȷ����ƶ���Ȼ����٣����ٺ��M1���м�Ъ�����������ƶ���ʹ�仺��ת���� ��������www.eadianqi.com
�綯��M2�ɽӴ���KM7��KM8ʵ������ת���ƣ����ж�·������������ƶ�Ϊ�㶯���ƣ�����M2Ϊ��ʱ���У��������һ�㳤�ڹ��ر����� ��������www.eadianqi.com �������Ƶ�· ��������www.eadianqi.com 1��M1���������� �Զ�������www.eadianqi.com��Ȩ���� 1��M1����������㶯���� �Զ�������www.eadianqi.com��Ȩ���� ��1��M1����㶯������SB4��KM1����Ȧͨ��1-2-3-4-5-15-16-0�õ磬�䳣�մ����ȴ�����������ã��䳣��������ͷ��պϣ�KM4ͨ��2-3-4-14-24-25-26-0�õ磬KM4�ij��ո�����ͷ�ȴ�����������ã�KM1��KM4�ij�������ͷ�պϣ�M1�Ķ�����������Ӵ���R��������������ɿ�SB4��KM1��KM4����Ȧ��̶ϵ磬M1ͣת�� �Զ�������www.eadianqi.com��Ȩ���� ��2��M1����㶯������SB5��KM2��KM4�õ磬M1������������Ӵ���R��������������ɿ�SB5��KM2��KM4���ʧ�磬M1ͣת�� �Զ�������www.eadianqi.com��Ȩ����
2��M1������������ٳ������� ��������www.eadianqi.com ��1��M1������ٳ���������SB2��KA1ͨ��2-3-4-5-6-7-0�õ磬�䳣�մ����ȴ�����������ã��䳣����ͷ��պϣ����д��㣨5-6��ʹKA1���������㣨12-0��ʹKM3ͨ��2-3-4-5-10-11-12-0�õ磬KM3�ij�������ͷ��R�̽ӣ���ͷ��15-19����KM3�ĸ���������ͷ��5-19��ʹKM1ͨ��2-3-4-5-19-15-16-0�õ磬�䳣�ո�����ͷ�ȴ�����������ã��䳣��������ͷ��4-14���պϣ�ʹKM4�õ磬KM4�ij�������ͷ�պϣ�M1�Ķ������������ȫѹ�����������ת�� �Զ�������www.eadianqi.com��Ȩ���� ��2��Ml������ٳ���������SB3��KA2�õ��Ա���KM3�õ罫R�̽ӣ�KM2�õ磬KM4�õ磬M1�Ķ������������ȫѹ�����������ת�� ��������www.eadianqi.com 3��M1������������ٳ������� �Զ�������www.eadianqi.com��Ȩ���� ҪMl���٣�ѹ��SQ9ʹ��պϣ���M1����ʱ��SQ9��ѹ�£��� �Զ�������www.eadianqi.com��Ȩ���� ҪMl������ٳ���ʱ������SB2��KA1�õ��Ա���KT��KM3ͬʱ�õ硣KM3�õ��R�̽ӣ�ͬʱʹKM1�õ磬KM4�õ磬M1�����������ȫѹ���������� ��������www.eadianqi.com
��Ml������ת�ٽӽ���ͬ����ʱ������KT������ʱ�䣬KT��ͨ����ʱ�ij��մ�ͷ��KM4ʧ�磬KM4�ij�������ͷ�ȸ�λ��Ml�����Դ��KT��ͨ����ʱ�պϵij�����ͷ�պϣ���KM4�ij��ո�����ͷ��λʱ��KM5��KM6ͨ��2-3-4-14-22-23-0�õ磬���ǵij��ո�����ͷ�ȴ�����������ã����ǵij�������ͷ��պϣ�Ml�Ķ�������YY�������������תΪ������ת�� �Զ�������www.eadianqi.com��Ȩ���� 2��Ml�ķ����ƶ����� �Զ�������www.eadianqi.com��Ȩ����
1��Ml������תͣ�����̡�Ml������תʱ��KA1��KM3��KM1��KM4�õ磬KV1�л��� �Զ�������www.eadianqi.com��Ȩ���� M1ͣ��ʱ������SB1���䳣�մ�ͷ�ȴ�KA1��KM3��KM1ʧ�硣KM3ʧ�磬R����Ml�Ķ��ӵ�Դ��·��KM1ʧ�磬Ml�ж������Դ��KM4ʧ��ʹM1�Ķ������鲻�١����ӡ���SB1�ij�����ͷ�պ�ʱ��KM2ͨ��2-3-4-14-20-21-0�õ�������KM4�ֵõ磬Ml�Ķ�����������Ӵ���R���з����ƶ�����Ml������ת�ٽ��͵��ٶȼ̵����ĸ�λת��ʱ��KV1��λ��KM2��KM4���ʧ�磬M1�����ƶ�������M1���ٷ�תͣ����������תʱ���ơ� ��������www.eadianqi.com 2��Ml������תͣ�����̡�Ml������תʱ��KA1��KM3��KT��KM1��KM5��KM6�õ磬KV1�л��� ��������www.eadianqi.com ҪMlͣ��ʱ������SB1��KA1��KM3��KM1��KTʧ�硣KM3ʧ���R����Ml�Ķ��ӵ�Դ��·��KM1ʧ�磬ʹKM5��KM6ʧ�磬��ʹKM2�õ磬KM4�õ磬M1�Ķ�����������Ӵ���R���з����ƶ�����M1������ת�ٽ��͵��ٶȼ̵����ĸ�λת��ʱ��KV1��λ��KM2��KM4���ʧ�磬Ml�����ƶ�������Ml���ٷ�תͣ����������תʱ���ơ� ��������www.eadianqi.com 3������������е����ʱ�ġ�“�嶯”��˲ʱ�㶯������ ��������www.eadianqi.com ��ΪKS1��KS2��SQ2��SQ4�ij��մ�ͷֻ����KM1����Ȧ��·�У�����ֻ����M1��תʱ��������������е����ʱ��“�嶯”���ơ� �Զ�������www.eadianqi.com��Ȩ���� 1�����������еĻ�е����ʱ��“�嶯”���ơ�Ҫ�����е����ʱ����������ٿ����ϵ��ֱ���������ʱ���ֱ���������ϵ��SQ1��SQ2��λ��M1���ٻ������תʱ��KV1�л���SQ1�ij������㸴λ����M1����ʱʹKTʧ�磬��M1�ߡ�����ʱʹ��KM3ʧ�硣R����M1�Ķ��ӵ�Դ��·����ʹKM1ʧ�磬KM1�ij�����ͷ�ȸ�λ�����M1ԭ��������ʱ����KM4ʧ�磻���M1ԭ��������ʱ����KM5��KM6ʧ�硣SQ1��KM1�ij��մ�ͷ��λʱ��KM2ͨ��2-3-4-14-20-21-0�õ磬KM4�õ磬M1������������Ӵ���R���з����ƶ���M1������ת���½��� ��������www.eadianqi.com ��M1����ͣתʱ��ת��������ٿ��̣�ת������ת��λ��ʱ���������ֱ�����ԭλ������ʱ��������ϲ��ϱ����ֱ��Ʋ���ʱ����Ϊ��ʱKV1�ij�����ͷ�Ѹ�λ��KM2ʧ�磬M1�жϸ����Դ����KV1��KM2���մ�ͷ��λǰ���£�KM1ͨ��2-3-4-14-17-18-15-16-0�õ磬KM4�õ磬M1���ӡ����Ӵ���R������������M1������ת�ٴﵽ�ٶȼ̵����Ķ���ת��ʱ��KV1�ij��մ�ͷ�ȴ�KM1ʧ�磬KM4ʧ�硣KV1������ͷ�պ�ʱ������KM1���ո�����ͷ��λ��KM2��KM4��̵õ磬�ظ���ǰ�Ĺ��̡� ��������www.eadianqi.com M1������Ъ�������ƶ���ʹM1��������ת�����ڳ������ϡ�һ���������Ϻã���������ֱ��ƻ�ԭλ��SQ1��SQ2�ij��մ�ͷ�ȴ��������“�嶯”������SQ1�ij�����ͷ��պϣ�KM3��KM1��̵õ磬M1ԭ����ʱ��KM4�õ磬M1�ֵ�����ת��M1ԭ����ʱ��KT�õ磬����KM3��KM1�õ磬����KM5��KM6�õ磬M1�ָ�����ת�� �Զ�������www.eadianqi.com��Ȩ���� 2�����������еĻ�е����“�嶯”���ơ�Ҫ��������ʱ�����������ٿ����ϵ��ֱ�������SQ3��SQ4��λ���Ժ�Ĺ������������������еĻ�е����“�嶯”���ơ� �Զ�������www.eadianqi.com��Ȩ���� 4�������䡢����̨������Ŀ����ƶ� ��������www.eadianqi.com �����ֱ���������λ��ʱ��SQ8�л���KM7�õ磬M2��ת�������ֱ���������λ��ʱ��SQ7�л���KM8�õ磬M2��ת�� ��������www.eadianqi.com 5����������빤��̨���� �Զ�������www.eadianqi.com��Ȩ���� ������̨����ͷ���Զ�����ʱ�������ֱ��������г̿���Ϊ���յ�SQ5�������������̵����Զ�����Ҳ���У������ֱ��������г̿���Ϊ���յ�SQ6��ʱ��SQ5��SQ6�����жϿ��Ƶ�·��M1ֹͣ��ת��M2Ҳ������ �Զ�������www.eadianqi.com��Ȩ����
|