自动控制网
―学习
自动控制
技术
电气自动化
技术从这里开始!
手机版
|
安全生产
|
电气论坛
|
高级搜索
|
网站地图
|
TAG标签
RSS订阅
[
设为首页
] [
加入收藏
]
首页
行业资讯
基础知识
电气控制
自动化
机器人
传感器
工业通讯
执行机构
线性系统
机床
当前位置:
自动控制网
>
电气控制
>
电力拖动
>
异步电动机等效电路
时间:
2015-09-19 19:03
来源:
www.eadianqi.com
编辑:
自动控制网
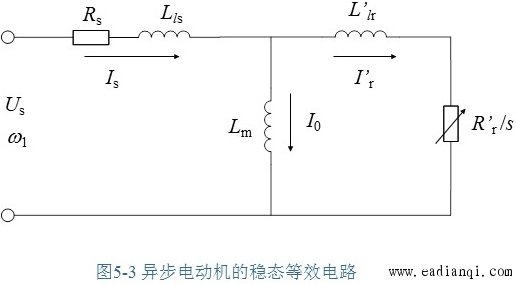
参数定义 Rs、Rr 定子每相电阻和折合到定子侧的转子每相电阻; Lls、Llr 定子每相漏感和折合到定子侧的转子每相漏感; Lm定子每相绕组产生气隙主磁通的等效电感,即励磁电感; Us、 定子相电压和供电角频率; s 转差率。 转矩公式 令电磁功率 Pm = 3Ir2 Rr /
参数定义
Rs、R’r ——定子每相电阻和折合到定子侧的转子每相电阻;
Lls、L’lr ——定子每相漏感和折合到定子侧的转子每相漏感;
Lm——定子每相绕组产生气隙主磁通的等效电感,即励磁电感;
Us、
——定子相电压和供电角频率;
s ——转差率。
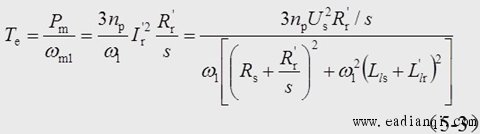
转矩公式
令电磁功率
自动控制网www.eadianqi.com版权所有
Pm = 3Ir'2 Rr' /s
同步机械角转速
式中 np —极对数,则异步
电机
的电磁转矩为
式(5 - 3)就是异步电机的机械特性方程式。它表明,当转速或转差率一定时,电磁转矩与定子电压的平方成正比。这样,不同电压下的机械特性便如图5-4所示,图中,UsN表示额定定子电压。
本文已影响
人
上一篇:
交流调速系统的主要类型
下一篇:
异步电动机机械特性
相关内容:
双馈调速的功率传输
绕线转子异步电动机转子串电阻调速
绕线转子异步电动机结构
转差功率的利用
三相异步电动机在两相坐标系上的状态方程
三相异步电动机在两相坐标系上的数学模型
三相异步电动机的多变量非线性数学模型
异步电动机机械特性
直流调速系统转速调节器参数的选择
各变量的稳态工作点和稳态参数计算
单闭环调速系统的缺点
无静差直流调速系统及其稳态参数计算
推荐内容
环流的定义
采用两组晶闸管反并联的可逆V-M系统,如果两组装置的整流电压同时出现,便会产生不流...
热点内容
三相--两相变换(3/2变换)
电压与磁链空间矢量的关系
转速调节器和电流调节器在双闭环
两相―两相旋转变换(2s/2r变换
三相异步电动机在两相坐标系上的
六拍阶梯波逆变器与正六边形空间
比例积分控制规律(PI调节器)
正弦波脉宽调制(SPWM)技术
转速闭环转差频率控制的变压变频
环流的定义
环流的分类
转速、磁链闭环控制的矢量控制系
直流调速系统转速环的动态结构图
瞬时脉动环流及其抑制
三相异步电动机在两相坐标系上的
按转子磁链定向的矢量控制方程及
转子磁链模型
不可逆PWM变换器