|
设计分为以下几个步骤:
1.电流环结构图的简化
2.电流调节器结构的选择
3.电流调节器的参数计算
4.电流调节器的实现
1.电流环结构图的简化
简化内容
忽略反电动势的动态影响
等效成单位负反馈系统
小惯性环节近似处理
① 忽略反电动势的动态影响及条件
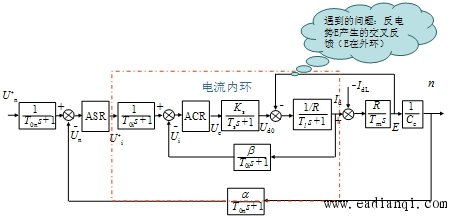
转速、电流双闭环调速系统: 自动控制网www.eadianqi.com版权所有
|
 |
|
忽略反电势E |
 |
|
电流调节过程比转速和反电动势的变化过程快得多,在按动态性能设计电流环时,可以暂不考虑反电动势变化的动态影响,即ΔE≈0。这时,电流环如下图所示。 |
 |
|
忽略E条件: |
 |
|
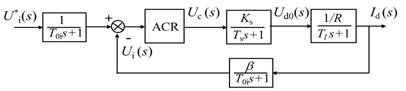
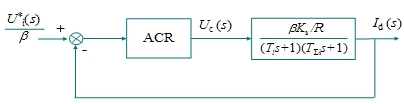
② 等效成单位负反馈系统 本文来自www.eadianqi.com
如果把给定滤波和反馈滤波两个环节都等效地移到环内,同时把给定信号改成U*i(s) /β ,则电流环便等效成单位负反馈系统: |
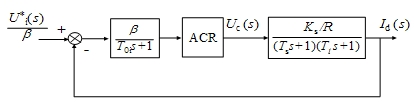 |
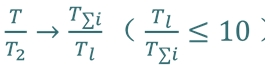
③ 小惯性环节近似处理
最后,由于Ts 和 Toi 一般都比Tl 小得多,可以当作小惯性群而近似地看作是一个惯性环节,其时间常数为
T∑i = Ts + Toi
简化的近似条件为 : |
 |
|
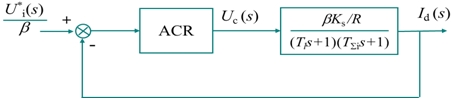
电流环结构图最终简化成: |
 |
|
2. 电流调节器结构的选择 本文来自www.eadianqi.com
典型系统的选择
对电流环的要求:
(a) 希望其跟随性能好(快)
(b) 具有保护特性
(c) 对电网电压波动的及时抗扰作用
已知:跟随性能好 → 选择典型 I 型系统
抗扰性能好 → 选择典型Ⅱ型系统 |
 |
经查表知,典型 I和典型Ⅱ抗
扰性能接近。所以电流环一般应选典型 I 型,在这种情况下,跟随性能好,而抗扰性能也不差。
电流调节器结构选择 |
 |
|
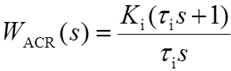
从电流环结构图的最终简化形式表明,电流环的控制对象是双惯性型的,要校正成典型 I 型系统,显然应采用PI型的电流调节器,其传递函数可以写成 |
 |
|
式中 Ki — 电流调节器的比例系数; 本文来自www.eadianqi.com
τi — 电流调节器的超前时间常数。
为了让调节器零点与控制对象的大时间常数极点对消,选择 |
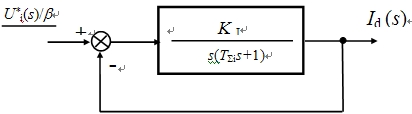
则电流环的动态结构图便成为典型I形式,其中
校正后电流环的结构和特性
①动态结构图: |
 |
|
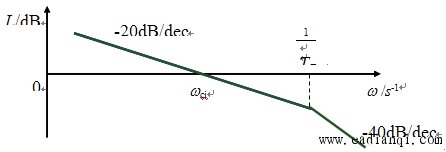
②开环对数幅频特性: |
 |
|
3. 电流调节器的参数计算 自动控制网www.eadianqi.com版权所有
电流调节器的参数有: Ki 和 τi
其中
(Tl 为已知参数)
剩下的只有比例系数 Ki, 可根据所需要的动态性能指标选取。
在一般情况下,希望电流超调量σi < 5%,查表可知,可选 ξ =0.707,KI T∑i =0.5,则 |
 (2-a) (2-a) |
由式 和式 和式 |
|
得到 |
 (2-b) (2-b) |
注意: 自动控制网www.eadianqi.com版权所有
如果实际系统要求的跟随性能指标不同,式(2-a)和式(2-b)当然应作相应的改变。
此外,如果对电流环的抗扰性能也有具体的要求,还得再校验一下抗扰性能指标是否满足。
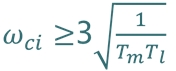
4. 电流环校验近似条件
以上设计结果是在一系列假定条件下得到的,具体设计时必须加以校验。
典型I型系统: |
 |
KI 为典型I型系统开环放大倍数
ωci电流环截止频率 |
|
|

