1.系统稳态结构框图 2. 系统静特性 ① ASR不饱和 这是ACR也不饱和,稳态时两个调节器的输入U=0。U n=0(转速无静差),U i=0(电流无静差)。即 n0为理想空载转速 ASR不饱和 运行段为一水平的直线 直线为 段 即静特性的n0-A段(水平段) 静特性 ② ASR饱
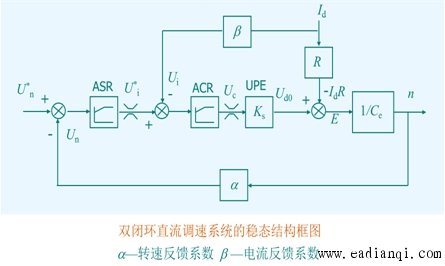
1.系统稳态结构框图
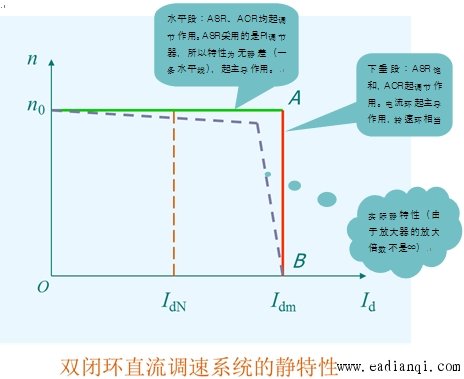
2. 系统静特性
① ASR不饱和
这是ACR也不饱和,稳态时两个调节器的输入ΔU=0。ΔU n=0(转速无静差),ΔU i=0(电流无静差)。即 自动控制网www.eadianqi.com版权所有
n0为理想空载转速
ASR不饱和运行段为一水平的直线
直线为 段
即静特性的n0-A段(水平段)
自动控制网www.eadianqi.com版权所有
静特性 本文来自www.eadianqi.com
② ASR饱和
ASR饱和:a. U*n 起动,n=0
b. U*n↓= 0,ASR输入只剩Un(负饱和)
c. n =0 堵转
ASR 饱和,转速外环开环。稳态时,ASR输出:
U*im=βI dm,(与n无关)
即静特性的A-B段,系统获得一很好的下垂特性
此时系统变成一个电流无静差单闭环调速系统。这一特性正好适合理想快速起动过程对I d的要求。