自动控制网
—学习
自动控制
技术
电气自动化
技术从这里开始!
手机版
|
安全生产
|
电气论坛
|
高级搜索
|
网站地图
|
TAG标签
RSS订阅
[
设为首页
] [
加入收藏
]
首页
行业资讯
基础知识
电气控制
自动化
机器人
传感器
工业通讯
执行机构
线性系统
机床
当前位置:
自动控制网
>
电气控制
>
电力拖动
>
无静差直流调速系统及其稳态参数计算
时间:
2015-09-19 18:44
来源:
www.eadianqi.com
编辑:
自动控制网
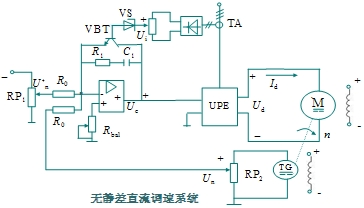
1. 系统组成 2. 稳态结构与静特性 当电动机电流低于其截止值时,上述系统的稳态结构图示于下图,其中 PI 调节器一般用它的输出特性,以表明是比例积分作用。 无静差直流调速系统稳态结构框图(Id Idcr ) 无静差系统的理想静特性如右图(实线)所示 当 Id Id
1. 系统组成
2. 稳态结构与静特性
当
电动机
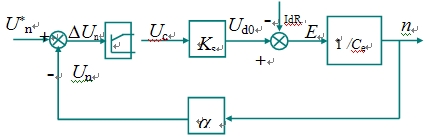
电流低于其截止值时,上述系统的稳态结构图示于下图,其中 PI 调节器一般用它的输出特性,以表明是比例积分作用。
无静差直流调速系统稳态结构框图(Id < Idcr )
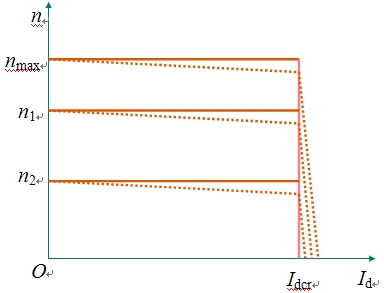
无静差系统的理想静特性如右图(实线)所示
当 Id ≤ Idcr 时,系统无静差,静特性是不同转速时的一族水平线。
自动控制网www.eadianqi.com版权所有
当 Id > Idcr 时,电流截止负反馈起作用,静特性急剧下垂,基本上是一条垂直线。整个静特性近似呈矩形。
带电流截止的无静差直流调速系统的静特性
◎必须指出
严格地说,“无静差”只是理论上的,实际系统在稳态时,PI 调节器积分电容两端电压不变,相当于运算放大器的反馈回路开路,其放大系数等于运算放大器本身的开环放大系数,数值很大,但并不是无穷大。因此其输入端仍存在很小的,而不是零。这就是说,实际上仍有很小的静差(如虚线所示),只是在一般精度要求下可以忽略不计而已。
4. 稳态参数计算
无静差调速系统的稳态参数计算很简单,在理想情况下,稳态时 △Un =Un* -Un = 0,因而 Un* = Un=αn ,可以直接计算转速反馈系数
nmax— 电动机调压时的最高转速(r/min);
本文来自www.eadianqi.com
U*nmax— 相应的最高给定电压(V)。
电流截止环节的参数很容易根据其电路和截止电流值 Idcr 计算出。
PI调节器的参数Kpi 和τ 可按动态校正的要求计算。
本文已影响
人
上一篇:
比例积分控制规律(PI调节器)
下一篇:
带电流正反馈的电压负反馈调速系统
相关内容:
如何实现变电站直流监控系统
什么是交流调速
发电机--电动机组调速系统
调速的负载能力与负载性质的配合
机床对调速的要求和实现
什么是电气调速
电力拖动系统的运动方程式
异步电机在次同步电动状态下的双馈系统——串级调速
双馈调速的功率传输
双馈调速的基本结构
双馈调速的概念
绕线转子异步电动机转子串电阻调速
转速闭环转差频率控制的变压变频调速系统
交流电机的物理模型
交流电机数学模型的性质
变压变频调速的基本控制方式
闭环控制的变压调速系统及其静特性
交流调速系统的主要类型
直流脉宽调速系统的机械特性
V-M系统的四象限运行
推荐内容
环流的定义
采用两组晶闸管反并联的可逆V-M系统,如果两组装置的整流电压同时出现,便会产生不流...
热点内容
三相--两相变换(3/2变换)
电压与磁链空间矢量的关系
转速调节器和电流调节器在双闭环
两相—两相旋转变换(2s/2r变换
三相异步电动机在两相坐标系上的
六拍阶梯波逆变器与正六边形空间
比例积分控制规律(PI调节器)
正弦波脉宽调制(SPWM)技术
转速闭环转差频率控制的变压变频
环流的定义
环流的分类
转速、磁链闭环控制的矢量控制系
直流调速系统转速环的动态结构图
瞬时脉动环流及其抑制
三相异步电动机在两相坐标系上的
按转子磁链定向的矢量控制方程及
转子磁链模型
不可逆PWM变换器