|
电动机的制动分机械制动和电气制动两种,这里只讨论电气制动。所谓电气制动,就是指使电动机产生一个与转速方向相反的电磁转矩起到阻碍运动的作用。 自动控制网www.eadianqi.com版权所有
电动机的制动有两方面的意义:一是使拖动系统迅速减速停车,这时的制动是指电动机从某一转速迅速减速到零的过程(包括只降低一段转速的过程),在制动过程中电动机的电磁转矩起着制动的作用,从而缩短停车时间,以提高生产率;二是限制位能性负载的下降速度。这时的制动是指电动机处于某一稳定的制动运行状态,此时电动机的电磁转矩起到与负载转矩相平衡的作用。 本文来自www.eadianqi.com (1)能耗制动 本文来自www.eadianqi.com
如图所示,为能耗制动原理图。制动前接触器KM的常开触头闭合,常闭触头断开,电动机有励磁将处于正向电动稳定运行状态,即电动机电磁转矩 自动控制网www.eadianqi.com版权所有
能耗制动时,电动机励磁不变,电枢电源电压U=0,由于机械惯性,制动初始瞬间转速n不能突变,仍保持原来的方向和大小,电枢感应电动势也保持原来的大小和方向,而电枢电流变为负,说明其方向与原来电动运行时相反,因此电磁转矩 本文来自www.eadianqi.com
在能耗制动过程中,电动机靠惯性旋转,电枢通过切割磁场将机械能转变成电能,再消耗在电枢回路电阻
由机械特性方程可做出能耗制动的机械特性是一条通过坐标原点并与电枢回路串接电 本文来自www.eadianqi.com 图 能耗制动机械特性 自动控制网www.eadianqi.com版权所有
(2)反接制动 自动控制网www.eadianqi.com版权所有 反接制动分为电枢电压反向反接制动和倒拉反接制动。 自动控制网www.eadianqi.com版权所有 a)电枢电压反向反接制动 本文来自www.eadianqi.com
本文来自www.eadianqi.com
阻
反接制动时,加到电枢两端的电源电压为反向电压- 本文来自www.eadianqi.com
图 电枢电压反向 自动控制网www.eadianqi.com版权所有
反接制动适合于要求频繁正.反转的电力拖动系统,先用反接制动达到迅速停车,然后接着反向启动并进入反向稳态运行,反之亦然。若只要求准确停车的系统,反接制动不如能耗制动方便。 本文来自www.eadianqi.com b)倒拉反转反接制动 本文来自www.eadianqi.com
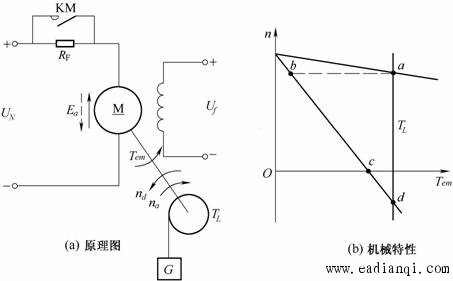
如图(a)所示,电动机提升重物时,将接触器KM常开触头断开,串入较大电阻RF,使提升的电磁转矩小于下降的位能转矩,拖动系统将进入倒拉反转反接制动。进入倒拉反转反接制动时,转速n反向为负值,使反电势e也反向为负值,电枢电流
图 他励电动机倒拉反接制动时的机械特性 自动控制网www.eadianqi.com版权所有
倒拉反转反接制动的机械特性就是电枢回路串电阻的人为机械特性,如图(b)所示。 本文来自www.eadianqi.com 电动机进入倒拉反接制动状态必须有位能负载反拖电动机,同时电枢回路要串入较大的电阻。在此状态中,位能负载转矩是拖动转矩,而电动机的电磁转矩是制动转矩,它抑制重物下放的速度,使之限制在安全范围之内,图3.38回馈制动机械特性 本文来自www.eadianqi.com 这种制动方式不能用于停车,只可以用于下放重物。 本文来自www.eadianqi.com (3)回馈制动 自动控制网www.eadianqi.com版权所有
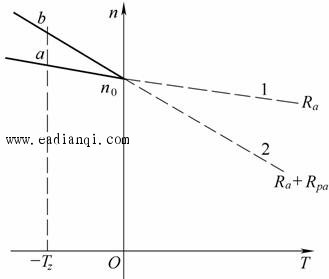
电动机在电动运行状态下,由于某种条件的变化(如带位能性负载下降.降压调速等),使电枢转速n超过理想空载转速n0,则进入回馈制动。回馈制动时,转速方向并未改变,而n>n0,使Ea>U,电枢电流 本文来自www.eadianqi.com 图是带位能负载下降时的回馈制动机械特性,电动机电动运行带动位能性负载下降,在电磁转矩和负载转矩的共同驱动下,转速沿特性曲线1逐渐升高,进入回馈制动后将稳定运行在a点上。需要指出的是,此时电枢回路不允许串入电阻,否则将会稳定运行在很高转速的b点上。 本文来自www.eadianqi.com |
 与转速n的方向相同(均为顺时针方向),
与转速n的方向相同(均为顺时针方向), 将电枢回路闭合,则进入能耗制动。
将电枢回路闭合,则进入能耗制动。 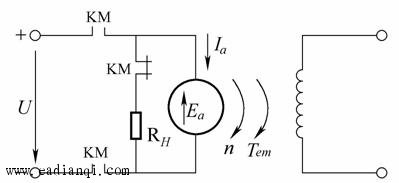 图 能耗制动原理图
图 能耗制动原理图  =0时停车。从能耗制动开始到拖动系统迅速减速及停车的过渡过程就叫做“能耗制动过程”。
=0时停车。从能耗制动开始到拖动系统迅速减速及停车的过渡过程就叫做“能耗制动过程”。 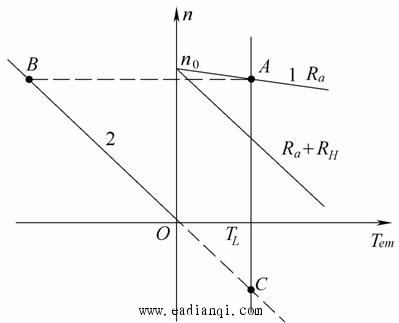 阻
阻 的人为机械特性平行的直线,如图所示。
的人为机械特性平行的直线,如图所示。 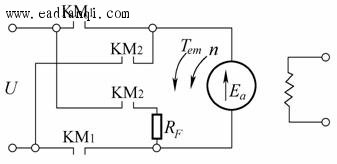
 ,则进入制动。
,则进入制动。  ,同时接入反接制动电阻RF。反接制动初始瞬间,由于机械惯性,转速不能突变,仍保持原来的方向和大小,电枢感应电动势也保持原来的大小和方向,而电枢电流变为-
,同时接入反接制动电阻RF。反接制动初始瞬间,由于机械惯性,转速不能突变,仍保持原来的方向和大小,电枢感应电动势也保持原来的大小和方向,而电枢电流变为- 电枢电流变负,电磁转矩
电枢电流变负,电磁转矩
 >0,而电磁功率
>0,而电磁功率 <0,表明从电源输入的电功率和机械转换的电功率都消耗在电枢回路电 自动控制网www.eadianqi.com版权所有
<0,表明从电源输入的电功率和机械转换的电功率都消耗在电枢回路电 自动控制网www.eadianqi.com版权所有